Autor: merakiki
Tradução: TechFlow
Durante décadas, o escopo de aplicação da robótica foi extremamente restrito, concentrando-se principalmente na execução de tarefas repetitivas em ambientes industriais estruturados. No entanto, a inteligência artificial (IA) de hoje está revolucionando o campo da robótica, permitindo que robôs compreendam e executem comandos dos usuários enquanto se adaptam a ambientes dinâmicos.
Estamos entrando em uma nova era de rápido crescimento. Segundo previsões do Citibank, até 2035, 1,3 bilhão de robôs serão implantados globalmente, com aplicações que vão das fábricas até residências e setores de serviços. Ao mesmo tempo, a Morgan Stanley prevê que apenas o mercado de robôs humanóides pode atingir um valor de 5 trilhões de dólares até 2050.
Apesar dessa expansão liberar um enorme potencial de mercado, ela também traz grandes desafios em centralização, confiança, privacidade e escalabilidade. As tecnologias Web3, ao apoiar redes robóticas descentralizadas, verificáveis, com proteção de privacidade e colaborativas, oferecem soluções transformadoras para esses problemas.
Neste artigo, vamos explorar em profundidade a cadeia de valor em evolução dos robôs de IA, com foco especial no campo dos robôs humanóides, e revelar as oportunidades atraentes resultantes da fusão entre robótica de IA e tecnologias Web3.
Cadeia de valor dos robôs de IA
A cadeia de valor dos robôs de IA é composta por quatro camadas fundamentais: hardware, inteligência, dados e agentes. Cada camada é construída sobre as demais, permitindo que os robôs percebam, raciocinem e ajam em ambientes reais complexos.
Nos últimos anos, sob a liderança de pioneiros do setor como Unitree e Figure AI, a camada de hardware fez avanços notáveis. No entanto, ainda existem muitos desafios críticos nas camadas não relacionadas ao hardware, especialmente a escassez de conjuntos de dados de alta qualidade, ausência de modelos fundamentais universais, baixa compatibilidade entre dispositivos e a necessidade de computação de borda confiável. Portanto, as maiores oportunidades de desenvolvimento atualmente estão nas camadas de inteligência, dados e agentes.
1.1 Camada de hardware: “Corpo”
Hoje, fabricar e implantar “corpos robóticos” modernos é mais fácil do que nunca. Já existem mais de 100 tipos diferentes de robôs humanóides no mercado, incluindo o Optimus da Tesla, o G1 da Unitree, o Digit da Agility Robotics e o Figure 02 da Figure AI.
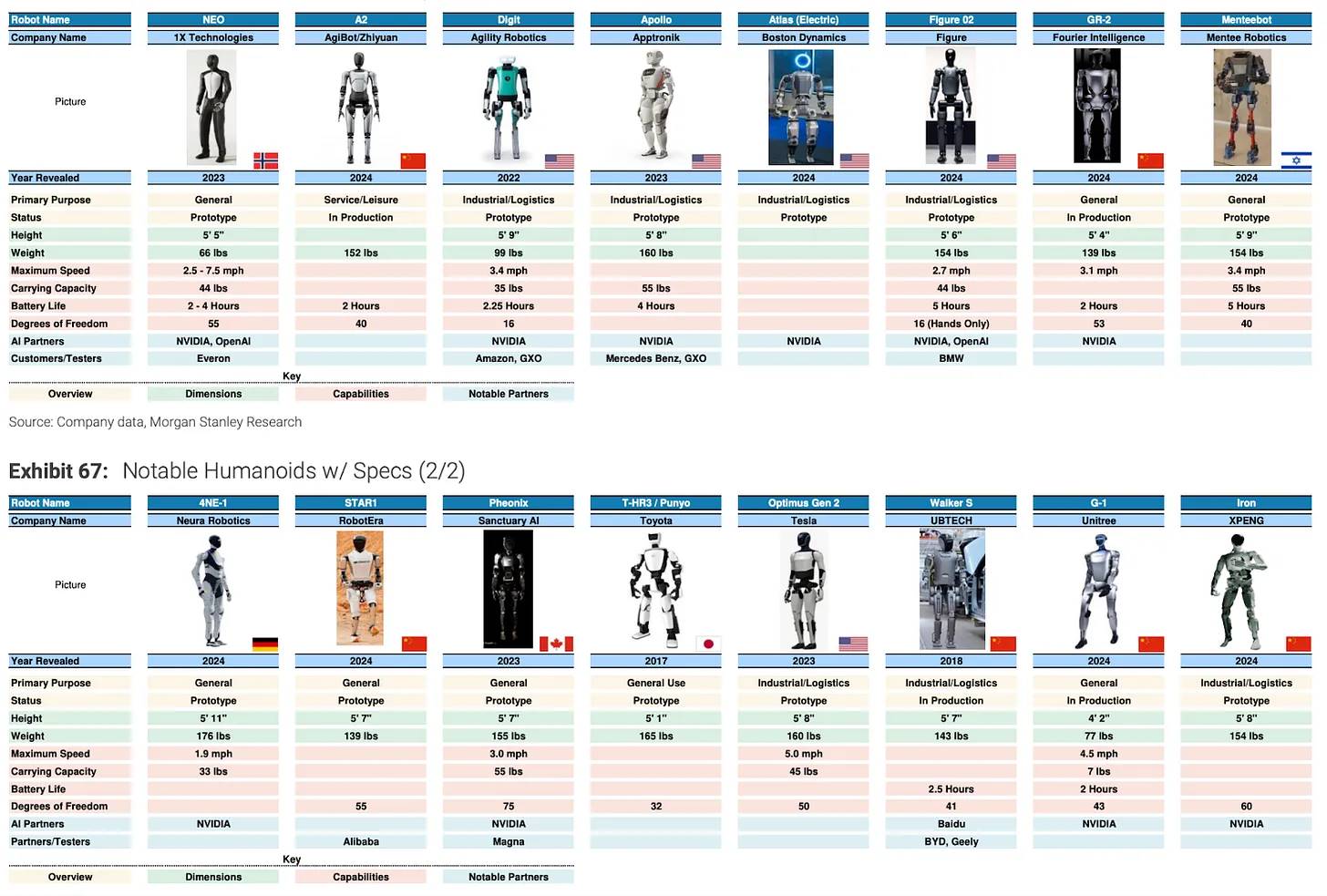
Fonte: Morgan Stanley, “Humanoid 100: Humanoid Value Chain Map”
Esse progresso se deve a avanços tecnológicos em três componentes-chave:
-
Atuadores (Actuators): Funcionando como os “músculos” dos robôs, os atuadores convertem comandos digitais em movimentos precisos. Inovações em motores de alto desempenho permitem que robôs realizem movimentos rápidos e precisos, enquanto atuadores elastoméricos dielétricos (Dielectric Elastomer Actuators, DEAs) são adequados para tarefas delicadas. Essas tecnologias aumentaram significativamente a flexibilidade dos robôs, como o Optimus Gen 2 da Tesla, que possui 22 graus de liberdade (DoF), e o G1 da Unitree, ambos demonstrando flexibilidade próxima à humana e impressionante mobilidade.
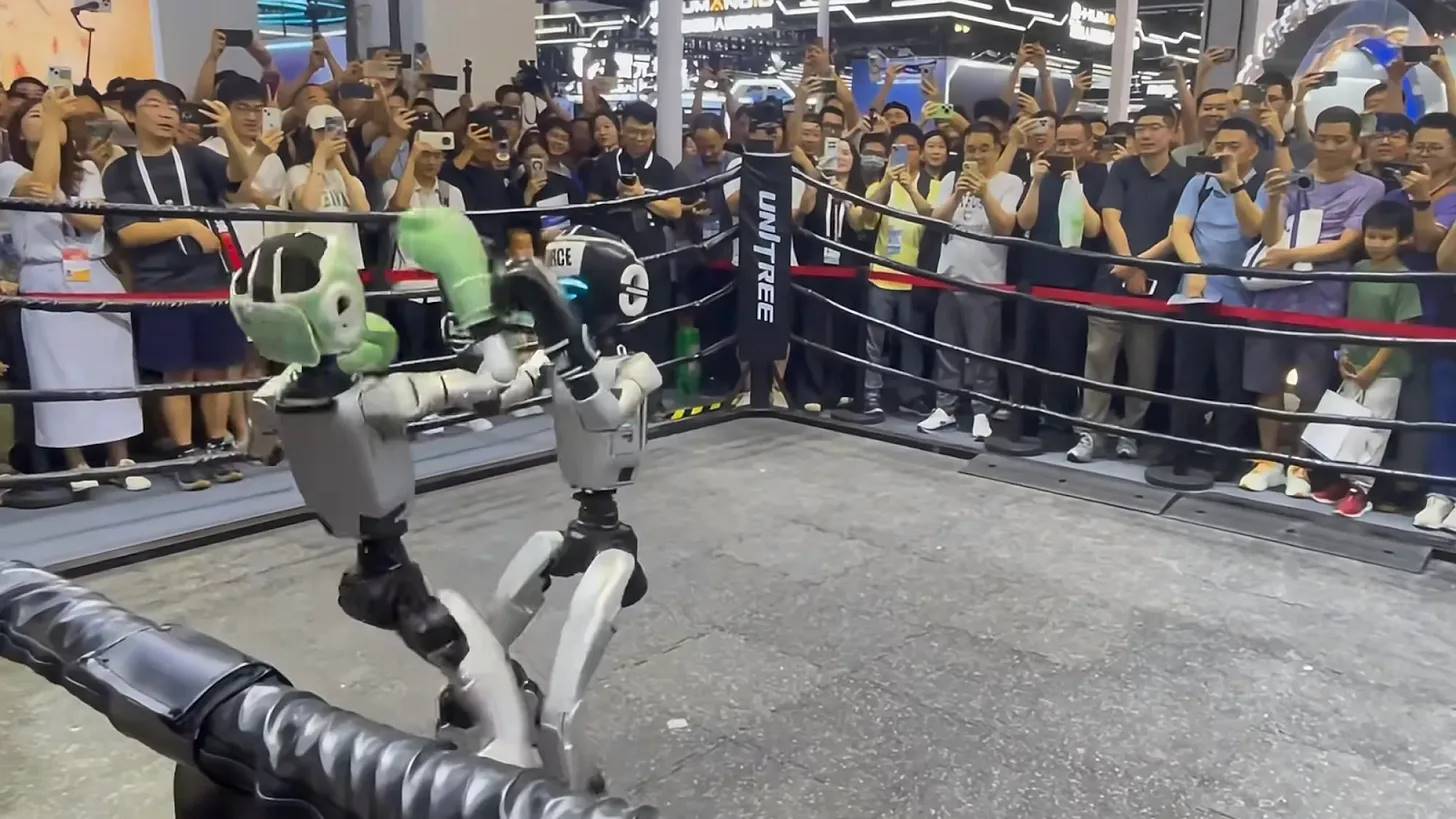
Fonte: Unitree apresentando seu mais recente robô humanóide em uma luta de boxe na WAIC 2025
-
Sensores (Sensors): Sensores avançados permitem que robôs percebam e interpretem o ambiente por meio de entradas visuais, LIDAR/RADAR, táteis e de áudio. Essas tecnologias possibilitam navegação segura, operações precisas e percepção contextual.
-
Computação embarcada (Embedded Computing): CPUs, GPUs e aceleradores de IA (como TPUs e NPUs) embarcados nos dispositivos processam dados dos sensores em tempo real e executam modelos de IA, permitindo decisões autônomas. Conexões confiáveis e de baixa latência garantem coordenação perfeita, enquanto arquiteturas híbridas de borda-nuvem permitem que robôs deleguem tarefas computacionais intensivas quando necessário.
1.2 Camada de inteligência: “Cérebro”
Com o amadurecimento do hardware, o foco do setor mudou para a construção do “cérebro robótico”: modelos fundamentais poderosos e estratégias de controle avançadas.
Antes da integração da IA, os robôs dependiam de automação baseada em regras, executando ações pré-programadas e carecendo de inteligência adaptativa.
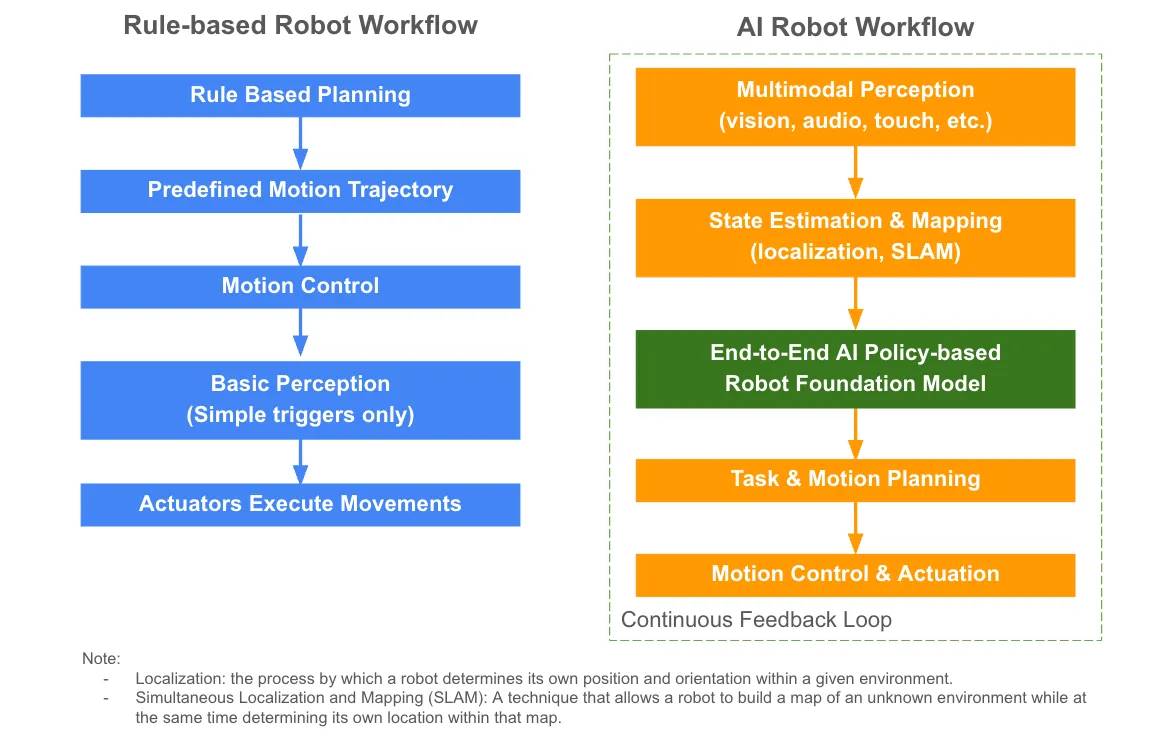
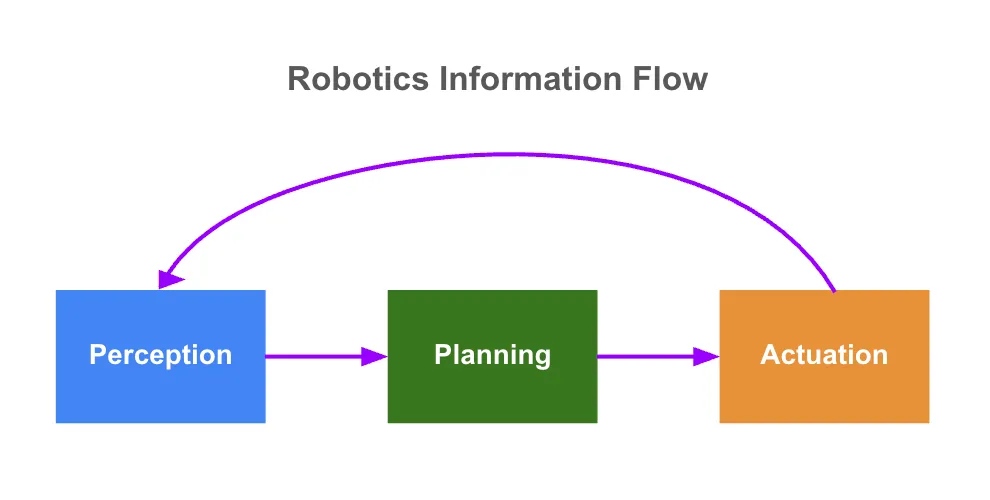
Modelos fundamentais estão sendo gradualmente aplicados à robótica. No entanto, grandes modelos de linguagem (LLMs) genéricos não são suficientes, pois robôs precisam perceber, raciocinar e agir em ambientes físicos dinâmicos. Para atender a essas necessidades, o setor está desenvolvendo modelos fundamentais de robótica baseados em políticas de ponta a ponta. Esses modelos permitem que robôs:
-
Percebam (Perceive): recebam dados multimodais de sensores (visão, áudio, tato)
-
Planejem (Plan): estimem seu próprio estado, mapeiem o ambiente e interpretem comandos complexos, mapeando percepções diretamente para ações e reduzindo a intervenção manual
-
Atuem (Act): gerem planos de movimento e emitam comandos de controle para execução em tempo real
Esses modelos aprendem “políticas” gerais de interação com o mundo, permitindo que robôs se adaptem a várias tarefas e operem com maior inteligência e autonomia. Modelos avançados também utilizam feedback contínuo, permitindo que robôs aprendam com a experiência e aprimorem ainda mais sua adaptabilidade em ambientes dinâmicos.
O modelo VLA mapeia entradas sensoriais (principalmente dados visuais e comandos em linguagem natural) diretamente para ações robóticas, permitindo que robôs emitam comandos de controle apropriados com base no que “veem” e “ouvem”. Exemplos notáveis incluem o RT-2 do Google, o Isaac GR00T N1 da Nvidia e o π0 da Physical Intelligence.
Para aprimorar esses modelos, geralmente são integradas várias abordagens complementares, como:
-
Modelos de mundo (World Models): constroem simulações internas do ambiente físico, ajudando robôs a aprender comportamentos complexos, prever resultados e planejar ações. Por exemplo, o recém-lançado Genie 3 do Google é um modelo de mundo universal capaz de gerar ambientes interativos diversificados sem precedentes.
-
Aprendizado por reforço profundo (Deep Reinforcement Learning): ajuda robôs a aprender comportamentos por tentativa e erro.
-
Teleoperação (Teleoperation): permite controle remoto e fornece dados de treinamento.
-
Aprendizado por demonstração (LfD)/Aprendizado por imitação (Imitation Learning): ensina novas habilidades aos robôs por meio da imitação de ações humanas.
A figura abaixo mostra como essas abordagens atuam nos modelos fundamentais de robótica.
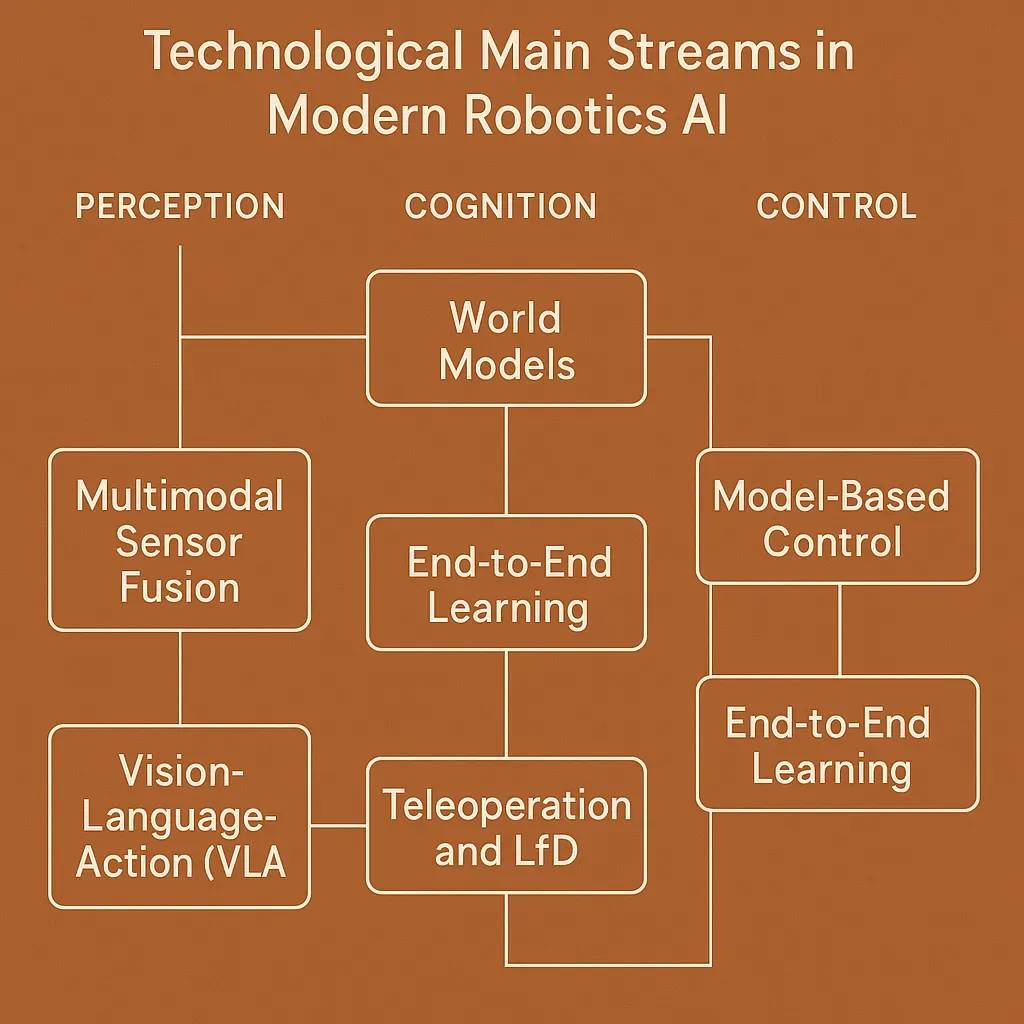
Fonte: Modelos de mundo: o núcleo da inteligência física impulsionando-nos em direção à AGI (World models: the physical intelligence core driving us toward AGI)
Alguns avanços recentes de código aberto, como o π0 da Physical Intelligence e o Isaac GR00T N1 da Nvidia, marcam progresso importante no campo. No entanto, a maioria dos modelos fundamentais de robótica ainda é centralizada e de código fechado. Empresas como Covariant e Tesla ainda mantêm códigos e conjuntos de dados proprietários, principalmente devido à falta de mecanismos abertos de incentivo.
Essa falta de transparência limita a colaboração e a interoperabilidade entre plataformas robóticas, destacando a necessidade de padrões on-chain para compartilhamento seguro e transparente de modelos, governança comunitária e camadas de interoperabilidade entre dispositivos. Essa abordagem promoverá confiança, cooperação e impulsionará o desenvolvimento mais robusto do setor.
1.3 Camada de dados: o “conhecimento” do cérebro
Conjuntos de dados robustos para robótica dependem de três pilares: quantidade, qualidade e diversidade.
Apesar dos esforços do setor para acumular dados, o tamanho dos conjuntos de dados robóticos existentes ainda é muito pequeno. Por exemplo, o GPT-3 da OpenAI foi treinado com 300 bilhões de tokens, enquanto o maior conjunto de dados robóticos open source, o Open X-Embodiment, contém apenas mais de 1 milhão de trajetórias robóticas reais, abrangendo 22 tipos de robôs. Isso está muito aquém da escala de dados necessária para habilidades de generalização robustas.
Algumas abordagens proprietárias, como a coleta de dados pela Tesla em sua “fábrica de dados”, onde funcionários usam trajes de captura de movimento para gerar dados de treinamento, realmente ajudam a coletar mais dados de movimento reais. No entanto, esses métodos são caros, limitados em diversidade de dados e difíceis de escalar.
Para enfrentar esses desafios, o setor de robótica está utilizando três principais fontes de dados:
-
Dados da internet: São abundantes e fáceis de escalar, mas principalmente observacionais, carecendo de sinais de sensores e movimento. O pré-treinamento de grandes modelos de linguagem visual (como GPT-4V e Gemini) nesses dados pode fornecer valiosos pré-requisitos semânticos e visuais. Além disso, adicionar rótulos cinemáticos a vídeos pode transformar vídeos brutos em dados de treinamento acionáveis.
-
Dados sintéticos: Dados sintéticos gerados por simulação permitem experimentação em larga escala e cobrem cenários diversos rapidamente, mas não refletem totalmente a complexidade do mundo real, uma limitação conhecida como “sim-to-real gap”. Pesquisadores usam adaptação de domínio (como aumento de dados, randomização de domínio, aprendizado adversarial) e transferência sim-to-real para superar esse problema, otimizando modelos iterativamente e ajustando-os em ambientes reais.
-
Dados do mundo real: Apesar de escassos e caros, são essenciais para a implementação de modelos e para preencher a lacuna entre simulação e implantação real. Dados reais de alta qualidade geralmente incluem visões egocêntricas, registrando o que o robô “vê” durante as tarefas, e dados de movimento, registrando ações precisas. Dados de movimento são normalmente coletados por demonstração humana ou teleoperação, usando realidade virtual (VR), dispositivos de captura de movimento ou ensino tátil, garantindo que o modelo aprenda com exemplos reais e precisos.
Pesquisas mostram que treinar robôs combinando dados da internet, do mundo real e sintéticos é significativamente mais eficiente e robusto do que depender de qualquer fonte isoladamente (nota: robustez refere-se à capacidade do sistema de permanecer forte e estável em situações anormais ou perigosas).
Enquanto aumentar a quantidade de dados ajuda, a diversidade dos dados é ainda mais importante, especialmente para generalizar para novas tarefas e morfologias robóticas. Para alcançar essa diversidade, são necessárias plataformas de dados abertas e compartilhamento colaborativo, incluindo a criação de conjuntos de dados multi-instância que suportam várias morfologias robóticas, impulsionando o desenvolvimento de modelos fundamentais mais robustos.
1.4 Camada de agentes: “Agentes físicos de IA”
A tendência de desenvolvimento de agentes físicos de IA está acelerando, com robôs autônomos capazes de agir independentemente no mundo real. O progresso na camada de agentes depende de ajustes finos dos modelos, aprendizado contínuo e adaptação prática para cada morfologia robótica única.
A seguir, algumas oportunidades emergentes para acelerar o desenvolvimento de agentes físicos de IA:
-
Aprendizado contínuo e infraestrutura adaptativa: Ciclos de feedback em tempo real e compartilhamento de experiências durante a implantação permitem que robôs melhorem continuamente.
-
Economia de agentes autônomos: Robôs operam como entidades econômicas independentes — negociando recursos como poder computacional e dados de sensores em mercados robóticos e gerando receita por meio de serviços tokenizados.
-
Sistemas multiagente: Plataformas e algoritmos de próxima geração permitem que grupos de robôs coordenem, colaborem e otimizem comportamentos coletivos.
Fusão de robôs de IA e Web3: liberando enorme potencial de mercado
À medida que os robôs de IA avançam da pesquisa para a implantação no mundo real, vários gargalos de longa data estão impedindo a inovação e limitando a escalabilidade, robustez e viabilidade econômica do ecossistema robótico. Esses gargalos incluem silos centralizados de dados e modelos, falta de confiança e rastreabilidade, restrições de privacidade e conformidade e falta de interoperabilidade.
2.1 Dores enfrentadas pelos robôs de IA
-
Silos centralizados de dados e modelos
Modelos robóticos exigem conjuntos de dados grandes e diversos. No entanto, o desenvolvimento de dados e modelos hoje é altamente centralizado, fragmentado e caro, resultando em sistemas desconectados e baixa adaptabilidade. Robôs implantados em ambientes dinâmicos do mundo real frequentemente apresentam desempenho inferior devido à falta de diversidade de dados e robustez dos modelos.
-
Confiança, rastreabilidade e confiabilidade
A ausência de registros transparentes e auditáveis (incluindo origem dos dados, processo de treinamento do modelo e histórico operacional do robô) enfraquece a confiança e a responsabilidade. Isso se tornou um dos principais obstáculos para a adoção de robôs por usuários, reguladores e empresas.
-
Privacidade, segurança e conformidade
Em aplicações sensíveis como robótica médica e doméstica, a proteção da privacidade é essencial e deve obedecer a regulamentos regionais rigorosos (como o GDPR europeu). Infraestruturas centralizadas têm dificuldades em apoiar colaboração de IA segura e com proteção de privacidade, limitando o compartilhamento de dados e inibindo a inovação em setores regulados ou sensíveis.
-
Escalabilidade e interoperabilidade
Sistemas robóticos enfrentam grandes desafios em compartilhamento de recursos, aprendizado colaborativo e integração entre múltiplas plataformas e morfologias. Essas limitações fragmentam os efeitos de rede e dificultam a transferência rápida de capacidades entre diferentes tipos de robôs.
2.2 Robôs de IA x Web3: soluções estruturais impulsionam oportunidades de investimento
Tecnologias Web3, por meio de redes robóticas descentralizadas, verificáveis, com proteção de privacidade e colaborativas, resolvem fundamentalmente os pontos problemáticos acima. Essa fusão está abrindo novas oportunidades de mercado para investimento:
-
Desenvolvimento colaborativo descentralizado: Redes baseadas em incentivos permitem que robôs compartilhem dados, desenvolvam modelos e agentes inteligentes em conjunto.
-
Rastreabilidade e responsabilidade verificáveis: Blockchain garante registros imutáveis da origem de dados e modelos, identidade robótica e histórico operacional, essenciais para confiança e conformidade.
-
Colaboração com proteção de privacidade: Soluções criptográficas avançadas permitem que robôs treinem modelos e compartilhem insights sem expor dados proprietários ou sensíveis.
-
Governança orientada pela comunidade: DAOs (organizações autônomas descentralizadas) orientam e supervisionam operações robóticas por meio de regras e políticas on-chain transparentes e inclusivas.
-
Interoperabilidade entre morfologias: Estruturas abertas baseadas em blockchain promovem colaboração perfeita entre diferentes plataformas robóticas, reduzindo custos de desenvolvimento e acelerando a transferência de capacidades.
-
Economia de agentes autônomos: Infraestrutura Web3 concede identidade econômica independente aos robôs, permitindo transações peer-to-peer, negociações e participação em mercados tokenizados sem intervenção humana.
-
Redes descentralizadas de infraestrutura física (DePIN): Compartilhamento peer-to-peer de recursos de computação, percepção, armazenamento e conexão baseados em blockchain, aumentando a escalabilidade e resiliência das redes robóticas.
A seguir, alguns projetos inovadores que estão impulsionando o desenvolvimento desse campo, demonstrando o potencial e as tendências da fusão entre robôs de IA e Web3. Claro, isso é apenas para referência e não constitui conselho de investimento.
Desenvolvimento descentralizado de dados e modelos
Plataformas Web3 incentivam contribuintes (como trajes de captura de movimento, compartilhamento de sensores, upload de imagens, rotulagem de dados e até geração de dados sintéticos) a democratizar o desenvolvimento de dados e modelos. Essa abordagem constrói conjuntos de dados e modelos mais ricos, diversos e representativos do que qualquer empresa isolada poderia alcançar. Estruturas descentralizadas também aumentam a cobertura de casos extremos, essencial para robôs operando em ambientes imprevisíveis.
Casos:
-
Frodobots: Protocolo de crowdsourcing de conjuntos de dados do mundo real por meio de jogos robóticos. Lançaram o projeto “Earth Rovers” — um robô de calçada e jogo global “Drive to Earn”, criando com sucesso o FrodoBots 2K Dataset, incluindo imagens de câmeras, dados de GPS, registros de áudio e dados de controle humano, abrangendo mais de 10 cidades e cerca de 2.000 horas de dados de direção remota de robôs.
-
BitRobot: Plataforma de incentivos cripto desenvolvida em conjunto pelo FrodoBots Lab e Protocol Labs, baseada na blockchain Solana e arquitetura de sub-redes. Cada sub-rede é definida como um desafio público, e contribuintes recebem recompensas em tokens ao submeter modelos ou dados, incentivando colaboração global e inovação open source.
-
Reborn Network: Camada fundamental para o ecossistema aberto de robôs AGI, oferece o traje de captura de movimento Rebocap, permitindo que qualquer pessoa registre e lucre com seus próprios dados de movimento real, promovendo a abertura de conjuntos de dados complexos para robôs humanóides.
-
PrismaX: Aproveita a força de contribuintes da comunidade global, garantindo diversidade e autenticidade dos dados por meio de infraestrutura descentralizada e mecanismos robustos de verificação e incentivo, impulsionando o desenvolvimento em escala de conjuntos de dados robóticos.
Prova de rastreabilidade e confiabilidade
Blockchain fornece transparência de ponta a ponta e atribuição de responsabilidade para o ecossistema robótico. Garante rastreabilidade verificável de dados e modelos, autentica identidade e localização física de robôs e mantém registros claros do histórico operacional e da participação dos contribuintes. Além disso, validação colaborativa, sistemas de reputação on-chain e mecanismos de validação baseados em participação garantem qualidade de dados e modelos, evitando que entradas de baixa qualidade ou fraudulentas prejudiquem o ecossistema.
Casos:
-
OpenLedger: Infraestrutura de IA blockchain que treina e implanta modelos dedicados usando conjuntos de dados de propriedade comunitária. Utiliza o mecanismo “Proof of Attribution” para garantir que contribuintes de dados de alta qualidade recebam recompensas justas.
Tokenização de propriedade, licenciamento e monetização
Ferramentas nativas de propriedade intelectual Web3 suportam licenciamento tokenizado de conjuntos de dados dedicados, capacidades robóticas, modelos e agentes inteligentes. Contribuintes podem usar contratos inteligentes para embutir termos de licenciamento diretamente em seus ativos, garantindo pagamentos automáticos de royalties quando dados ou modelos são reutilizados ou monetizados. Essa abordagem promove acesso transparente e sem permissão, criando um mercado aberto e justo para dados e modelos robóticos.
Casos:
-
Poseidon: Camada de dados descentralizada full-stack baseada no protocolo Story centrado em IP, fornecendo dados de treinamento de IA com autorização legal.
Soluções de proteção de privacidade
Dados gerados em hospitais, quartos de hotel ou residências são de alto valor, embora difíceis de obter por meios públicos, mas seu rico contexto pode melhorar significativamente o desempenho de modelos fundamentais. Soluções criptográficas transformam dados privados em ativos on-chain, tornando-os rastreáveis, composáveis e monetizáveis, enquanto protegem a privacidade. Tecnologias como ambientes de execução confiáveis (TEEs) e provas de conhecimento zero (ZKPs) permitem computação segura e verificação de resultados sem expor dados brutos. Essas ferramentas permitem que organizações treinem modelos de IA em dados sensíveis distribuídos, mantendo privacidade e conformidade.
Casos:
-
Phala Network: Permite que desenvolvedores implantem aplicativos em TEEs seguros para processamento confidencial de IA e dados.
Governança aberta e auditável
O treinamento de robôs geralmente depende de sistemas proprietários de caixa-preta, sem transparência ou adaptabilidade. Governança transparente e verificável é essencial para reduzir riscos e aumentar a confiança de usuários, reguladores e empresas. Tecnologias Web3 permitem supervisão comunitária on-chain, promovendo o desenvolvimento colaborativo de inteligência robótica open source.
Casos:
-
Openmind: Uma stack de software AI-native aberta que ajuda robôs a pensar, aprender e colaborar. Propuseram o padrão ERC7777, visando estabelecer um ecossistema robótico verificável e regulado, com foco em segurança, transparência e escalabilidade. O padrão define interfaces padronizadas para gerenciar identidades humanas e robóticas, executar conjuntos de regras sociais e registrar/remover participantes, esclarecendo direitos e responsabilidades.
Pensamentos finais
Com a fusão entre robôs de IA e tecnologias Web3, estamos entrando em uma nova era em que sistemas autônomos podem colaborar e se adaptar em larga escala. Os próximos 3 a 5 anos serão cruciais, com o rápido desenvolvimento de hardware impulsionando o surgimento de modelos de IA mais poderosos, baseados em conjuntos de dados do mundo real mais ricos e mecanismos de colaboração descentralizados. Esperamos que agentes de IA dedicados surjam em setores como hotelaria e logística, criando enormes novas oportunidades de mercado.
No entanto, essa fusão entre robôs de IA e tecnologias cripto também traz desafios. Projetar mecanismos de incentivo equilibrados e eficazes ainda é complexo e está em constante evolução; o sistema precisa recompensar contribuintes de forma justa e evitar abusos. A complexidade técnica também é um grande desafio, exigindo o desenvolvimento de soluções robustas e escaláveis para integração perfeita de múltiplos tipos de robôs. Além disso, as tecnologias de proteção de privacidade devem ser suficientemente confiáveis para conquistar a confiança das partes interessadas, especialmente ao lidar com dados sensíveis. O ambiente regulatório em rápida mudança também exige cautela para garantir conformidade em diferentes jurisdições. Abordar esses riscos e alcançar retornos sustentáveis é fundamental para impulsionar o avanço tecnológico e a adoção generalizada.
Vamos acompanhar juntos o desenvolvimento deste campo, promovendo o progresso por meio da colaboração e aproveitando as oportunidades que surgem neste mercado em rápida expansão.
A inovação em robótica é uma jornada que vale a pena trilhar em conjunto :)
Por fim, agradeço ao Chain of Thought e ao artigo “Robotics & The Age of Physical AI” pelo valioso apoio à minha pesquisa.