Autor: merakiki
Tłumaczenie: TechFlow
Przez dziesięciolecia zakres zastosowań robotyki był bardzo wąski, głównie skoncentrowany na wykonywaniu powtarzalnych zadań w zorganizowanych środowiskach fabrycznych. Jednak dzisiejsza sztuczna inteligencja (AI) całkowicie przekształca dziedzinę robotyki, umożliwiając robotom rozumienie i wykonywanie poleceń użytkowników, a także adaptację do dynamicznie zmieniających się środowisk.
Wkraczamy w nową erę szybkiego wzrostu. Według prognoz Citi Bank, do 2035 roku na świecie zostanie wdrożonych 1.3 miliarda robotów, a zakres ich zastosowań rozszerzy się z fabryk na domy i sektor usługowy. Jednocześnie Morgan Stanley przewiduje, że tylko rynek robotów humanoidalnych może osiągnąć wartość 5 bilionów dolarów do 2050 roku.
Mimo że ta ekspansja uwalnia ogromny potencjał rynkowy, towarzyszą jej również poważne wyzwania w zakresie centralizacji, zaufania, prywatności i skalowalności. Technologie Web3, wspierając zdecentralizowane, weryfikowalne, chroniące prywatność i współpracujące sieci robotów, oferują przełomowe rozwiązania tych problemów.
W tym artykule zagłębimy się w ewoluujący łańcuch wartości AI w robotyce, ze szczególnym uwzględnieniem robotów humanoidalnych, oraz przedstawimy fascynujące możliwości wynikające z połączenia AI w robotyce i technologii Web3.
Łańcuch wartości AI w robotyce
Łańcuch wartości AI w robotyce składa się z czterech podstawowych warstw: sprzęt, inteligencja, dane i agenci. Każda warstwa buduje się na pozostałych, umożliwiając robotom percepcję, rozumowanie i działanie w złożonych, rzeczywistych środowiskach.
W ostatnich latach, pod przewodnictwem pionierów branży, takich jak Unitree i Figure AI, warstwa sprzętowa poczyniła znaczące postępy. Jednak na poziomach innych niż sprzętowy nadal istnieje wiele kluczowych wyzwań, zwłaszcza niedobór wysokiej jakości zbiorów danych, brak uniwersalnych modeli bazowych, słaba kompatybilność między urządzeniami oraz potrzeba niezawodnego edge computingu. Dlatego obecnie największe możliwości rozwoju leżą w warstwie inteligencji, danych i agentów.
1.1 Warstwa sprzętowa: „Ciało”
Obecnie produkcja i wdrażanie nowoczesnych „ciał robotów” jest łatwiejsze niż kiedykolwiek wcześniej. Na rynku dostępnych jest już ponad 100 różnych typów robotów humanoidalnych, w tym Tesla Optimus, Unitree G1, Agility Robotics Digit oraz Figure AI Figure 02.
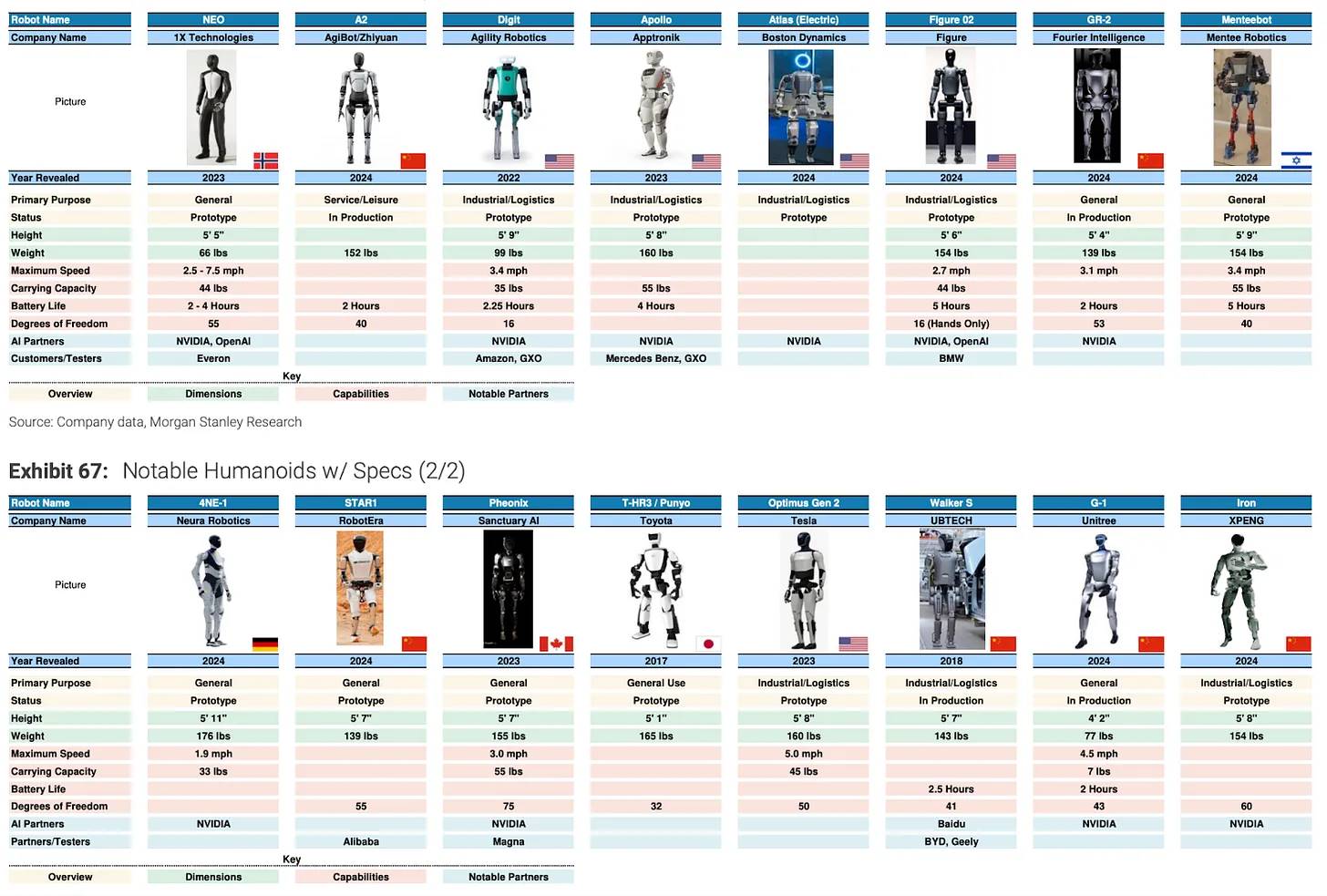
Źródło: Morgan Stanley, „Humanoid 100: Mapa łańcucha wartości robotów humanoidalnych”
Ten postęp jest możliwy dzięki przełomom technologicznym w trzech kluczowych komponentach:
-
Siłowniki (Actuators): Działając jako „mięśnie” robota, siłowniki przekształcają cyfrowe polecenia w precyzyjne ruchy. Innowacje w zakresie wysokowydajnych silników umożliwiają robotom szybkie i precyzyjne działania, a dielektryczne siłowniki elastomerowe (Dielectric Elastomer Actuators, DEAs) nadają się do zadań wymagających precyzji. Technologie te znacząco zwiększają elastyczność robotów, na przykład Tesla Optimus Gen 2 posiada 22 stopnie swobody (DoF), a Unitree G1 prezentują elastyczność zbliżoną do ludzkiej oraz imponujące zdolności ruchowe.
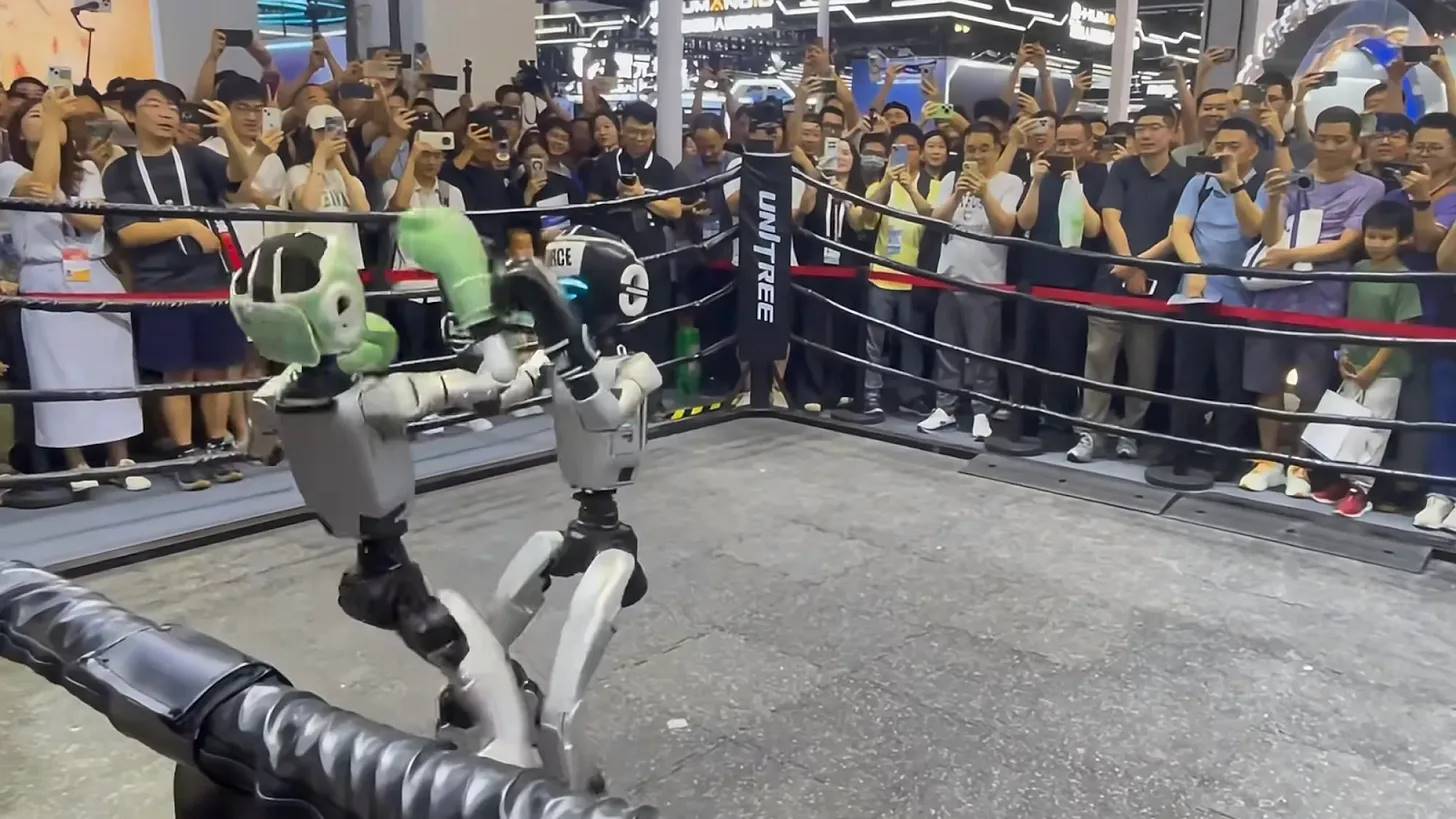
Źródło: Unitree prezentuje swojego najnowszego robota humanoidalnego podczas zawodów bokserskich na WAIC 2025 World Artificial Intelligence Conference
-
Czujniki (Sensors): Zaawansowane czujniki umożliwiają robotom percepcję i interpretację otoczenia poprzez wejścia wizualne, LIDAR/RADAR, dotykowe i dźwiękowe. Technologie te wspierają bezpieczną nawigację, precyzyjne operacje oraz świadomość kontekstu.
-
Wbudowane obliczenia (Embedded Computing): Procesory CPU, GPU i akceleratory AI (takie jak TPU i NPU) na urządzeniu umożliwiają przetwarzanie danych z czujników i uruchamianie modeli AI w czasie rzeczywistym, co pozwala na autonomiczne podejmowanie decyzji. Niezawodne, niskolatencyjne połączenia zapewniają płynną koordynację, a hybrydowa architektura edge-cloud pozwala robotom przekazywać wymagające zadania obliczeniowe do chmury w razie potrzeby.
1.2 Warstwa inteligencji: „Mózg”
Wraz z dojrzewaniem sprzętu, uwaga branży przesuwa się na budowę „mózgu robota”: potężnych modeli bazowych i zaawansowanych strategii sterowania.
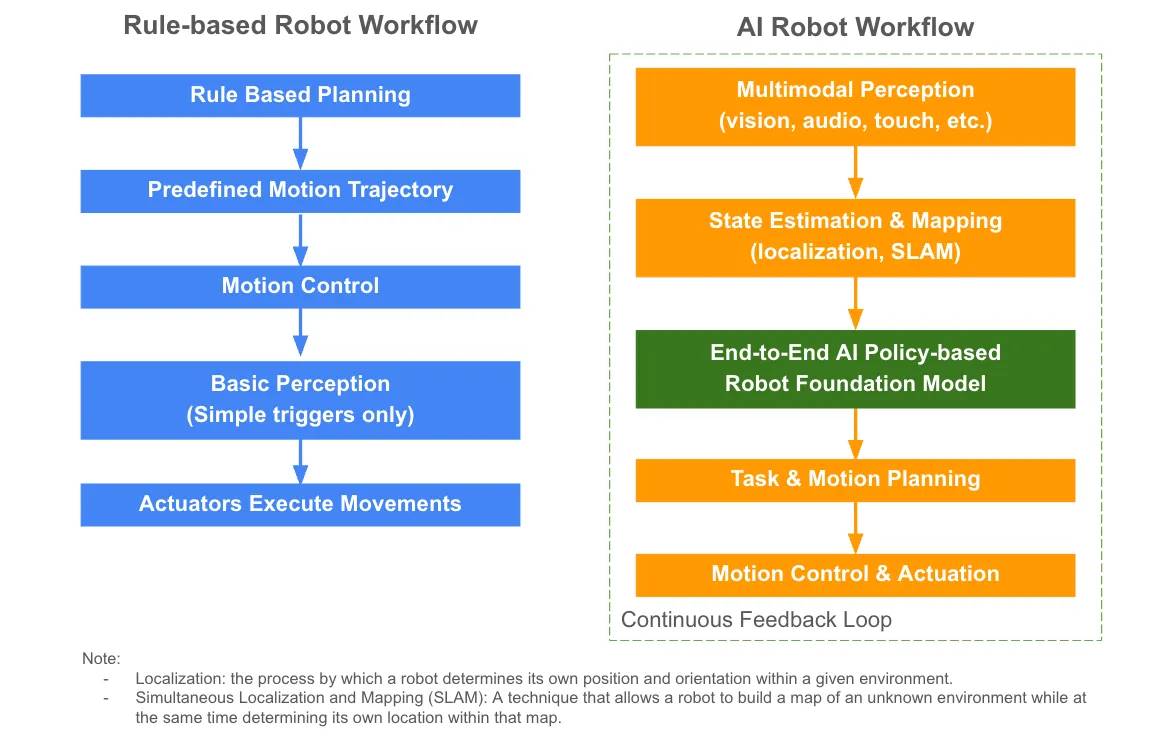
Przed integracją AI roboty polegały na automatyzacji opartej na regułach, wykonując zaprogramowane działania bez adaptacyjnej inteligencji.
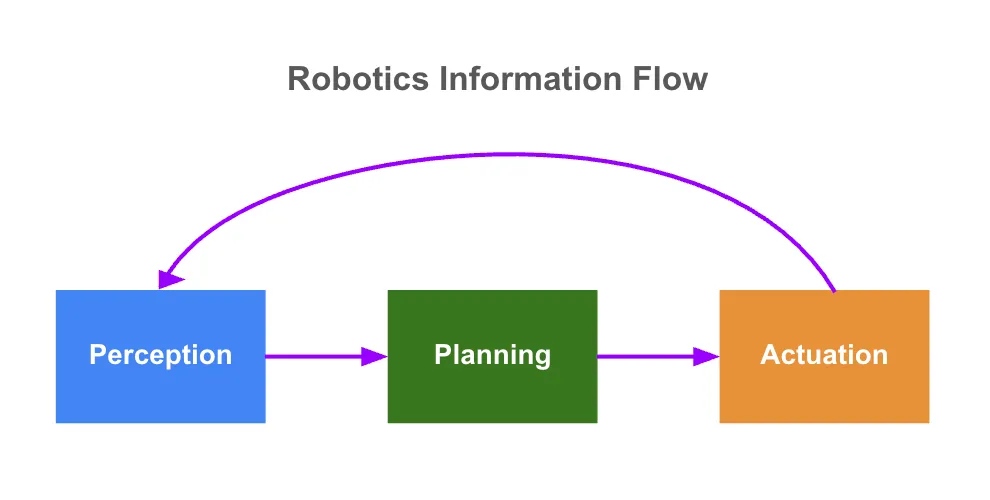
Modele bazowe są stopniowo wdrażane w robotyce. Jednak same uniwersalne duże modele językowe (LLMs) nie wystarczają, ponieważ roboty muszą postrzegać, rozumować i działać w dynamicznym środowisku fizycznym. Aby sprostać tym wymaganiom, branża rozwija oparte na politykach, end-to-end modele bazowe dla robotyki. Modele te umożliwiają robotom:
-
Percepcję (Perceive): odbieranie danych z wielu czujników (wizja, dźwięk, dotyk)
-
Planowanie (Plan): szacowanie własnego stanu, tworzenie map środowiska i interpretowanie złożonych poleceń, bezpośrednie mapowanie percepcji na działanie, ograniczając potrzebę inżynierii ręcznej
-
Działanie (Act): generowanie planów ruchu i wydawanie poleceń sterujących do realizacji w czasie rzeczywistym
Modele te uczą się ogólnych „polityk” interakcji ze światem, umożliwiając robotom adaptację do różnych zadań i działanie z większą inteligencją oraz autonomią. Zaawansowane modele wykorzystują także ciągłą informację zwrotną, pozwalając robotom uczyć się na podstawie doświadczenia i jeszcze lepiej adaptować się do dynamicznych środowisk.
Model VLA mapuje wejścia sensoryczne (głównie dane wizualne i polecenia w języku naturalnym) bezpośrednio na działania robota, umożliwiając wydawanie odpowiednich poleceń sterujących na podstawie tego, co „widzi” i „słyszy”. Warto zwrócić uwagę na przykłady takie jak Google RT-2, Nvidia Isaac GR00T N1 oraz Physical Intelligence π0.
Aby wzmocnić te modele, często integruje się różne uzupełniające metody, takie jak:
-
Modele świata (World Models): Budowanie wewnętrznych symulacji środowiska fizycznego, pomagające robotom uczyć się złożonych zachowań, przewidywać wyniki i planować działania. Przykładem jest niedawno wprowadzony przez Google Genie 3 – uniwersalny model świata, generujący niespotykaną różnorodność środowisk interaktywnych.
-
Głębokie uczenie przez wzmacnianie (Deep Reinforcement Learning): Umożliwia robotom uczenie się zachowań poprzez metodę prób i błędów.
-
Zdalna obsługa (Teleoperation): Pozwala na zdalne sterowanie i dostarczanie danych treningowych.
-
Nauka przez demonstrację (LfD)/Nauka przez naśladowanie (Imitation Learning): Nauczanie robotów nowych umiejętności poprzez naśladowanie ludzkich ruchów.
Poniższy diagram pokazuje, jak te metody są wykorzystywane w modelach bazowych robotyki.
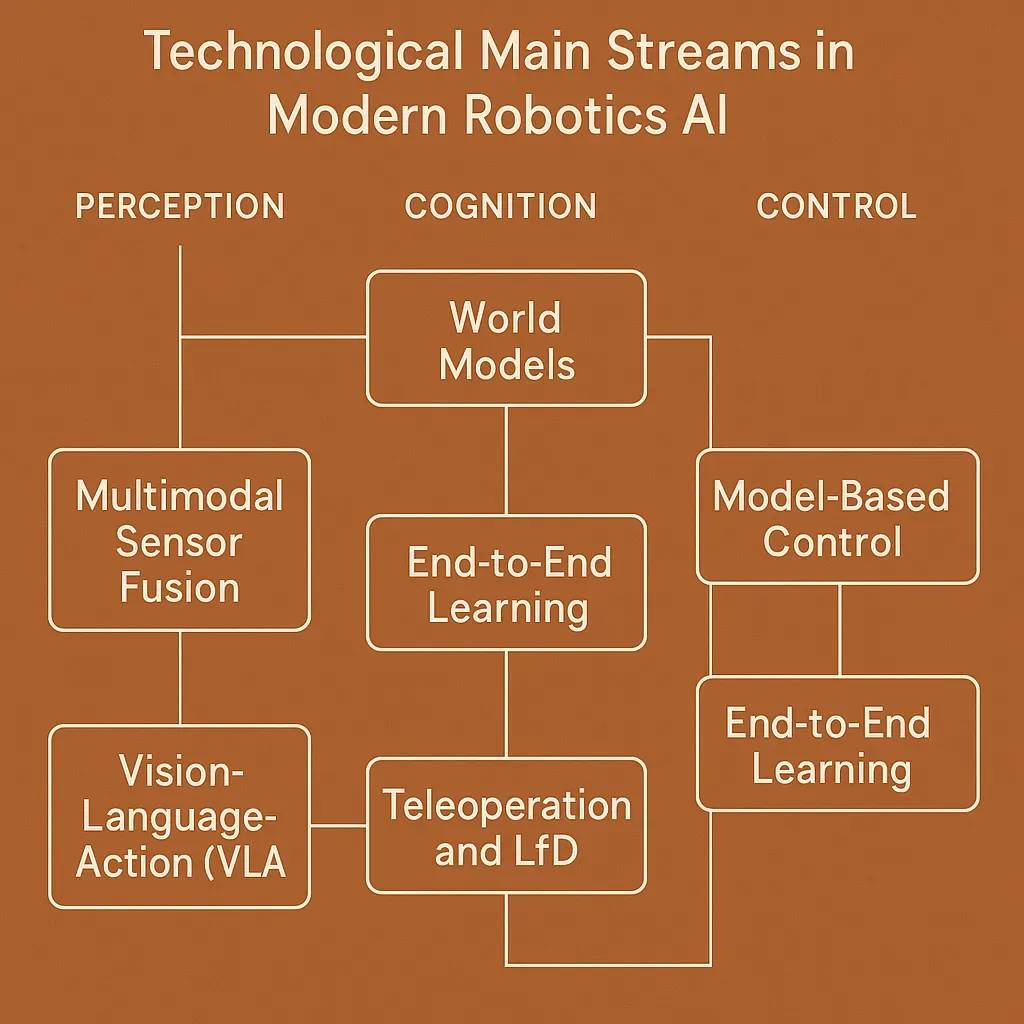
Źródło: Modele świata: fizyczny rdzeń inteligencji napędzający nas w kierunku AGI (World models: the physical intelligence core driving us toward AGI)
Ostatnie przełomy open source, takie jak Physical Intelligence π0 i Nvidia Isaac GR00T N1, oznaczają ważny postęp w tej dziedzinie. Jednak większość modeli bazowych robotów pozostaje scentralizowana i zamknięta. Firmy takie jak Covariant, Tesla nadal zachowują własnościowy kod i zbiory danych, głównie z powodu braku otwartych mechanizmów motywacyjnych.
Brak tej przejrzystości ogranicza współpracę i interoperacyjność między platformami robotycznymi, podkreślając potrzebę bezpiecznego i przejrzystego udostępniania modeli, standardów zarządzania społecznością on-chain oraz warstw interoperacyjności między urządzeniami. Takie podejście sprzyja zaufaniu, współpracy i napędza silniejszy rozwój tej dziedziny.
1.3 Warstwa danych: „Wiedza mózgu”
Potężne zbiory danych dla robotów opierają się na trzech filarach: ilości, jakości i różnorodności.
Mimo że branża poczyniła postępy w gromadzeniu danych, obecne zbiory danych robotycznych są nadal zbyt małe. Na przykład GPT-3 od OpenAI został wytrenowany na 300 miliardach tokenów, podczas gdy największy otwarty zbiór danych robotycznych Open X-Embodiment zawiera tylko ponad 1 milion rzeczywistych trajektorii robotów, obejmujących 22 typy robotów. To wciąż daleko od skali wymaganej do osiągnięcia silnych zdolności uogólniania.
Niektóre własnościowe metody, takie jak zbieranie danych przez Teslę w „fabryce danych”, gdzie pracownicy noszą stroje do przechwytywania ruchu, rzeczywiście pomagają w gromadzeniu większej ilości rzeczywistych danych ruchowych. Jednak metody te są kosztowne, ograniczone pod względem różnorodności danych i trudne do skalowania.
Aby sprostać tym wyzwaniom, robotyka korzysta z trzech głównych źródeł danych:
-
Dane z Internetu: Dane internetowe są obszerne i łatwe do skalowania, ale głównie obserwacyjne, bez sygnałów z czujników i ruchu. Wstępne trenowanie dużych modeli wizualno-językowych (takich jak GPT-4V i Gemini) na danych internetowych dostarcza cennych semantycznych i wizualnych priorytetów. Dodanie etykiet kinematycznych do wideo pozwala przekształcić surowe nagrania w użyteczne dane treningowe.
-
Dane syntetyczne: Dane generowane w symulacji pozwalają na szybkie, szeroko zakrojone eksperymenty i obejmują różnorodne scenariusze, ale nie odzwierciedlają w pełni złożoności świata rzeczywistego – to ograniczenie nazywane jest „luką symulacja-rzeczywistość” (sim-to-real gap). Badacze stosują adaptację dziedzinową (np. augmentację danych, randomizację dziedzin, uczenie kontradyktoryjne) i transfer symulacja-rzeczywistość, aby rozwiązać ten problem, iteracyjnie optymalizując modele i testując je oraz dostrajając w rzeczywistych warunkach.
-
Dane ze świata rzeczywistego: Choć rzadkie i kosztowne, dane rzeczywiste są kluczowe dla wdrożenia modeli i zniwelowania luki między symulacją a rzeczywistością. Wysokiej jakości dane rzeczywiste zwykle obejmują widoki z pierwszej osoby (egocentryczne), rejestrujące to, co robot „widzi” podczas zadania, oraz dane ruchowe, dokumentujące precyzyjne działania. Dane ruchowe są zwykle pozyskiwane przez demonstracje ludzkie lub zdalne sterowanie, z wykorzystaniem VR, urządzeń do przechwytywania ruchu lub nauczania dotykowego, zapewniając naukę na podstawie dokładnych, rzeczywistych przykładów.
Badania wykazują, że połączenie danych internetowych, rzeczywistych i syntetycznych w treningu robotów znacząco zwiększa efektywność treningu i odporność modeli (uwaga TechFlow: odporność oznacza zdolność systemu do zachowania siły i stabilności w sytuacjach awaryjnych lub niebezpiecznych).
Jednocześnie, choć zwiększenie ilości danych pomaga, to różnorodność danych jest jeszcze ważniejsza, zwłaszcza dla uogólniania na nowe zadania i formy robotów. Osiągnięcie tej różnorodności wymaga otwartych platform danych i współdzielonego udostępniania danych, w tym tworzenia zbiorów danych obejmujących wiele form robotów, co napędza rozwój silniejszych modeli bazowych.
1.4 Warstwa agentów: „Fizyczni agenci AI”
Trend rozwoju w kierunku fizycznych agentów AI przyspiesza – te autonomiczne roboty mogą działać samodzielnie w rzeczywistym świecie. Postęp w warstwie agentów zależy od precyzyjnego dostrajania modeli, ciągłego uczenia się oraz praktycznej adaptacji do unikalnej formy każdego robota.
Poniżej przedstawiono kilka nowych możliwości przyspieszających rozwój fizycznych agentów AI:
-
Ciągłe uczenie się i adaptacyjna infrastruktura: Dzięki pętlom informacji zwrotnej w czasie rzeczywistym i dzieleniu się doświadczeniami podczas wdrożenia, roboty mogą stale się doskonalić.
-
Autonomiczna gospodarka agentów: Roboty działają jako niezależne podmioty gospodarcze – handlując zasobami (np. mocą obliczeniową, danymi z czujników) na rynku robotów i generując przychody poprzez usługi tokenizowane.
-
Systemy wieloagentowe: Nowa generacja platform i algorytmów umożliwia koordynację, współpracę i optymalizację zachowań kolektywnych wśród grup robotów.
Fuzja AI w robotyce i Web3: uwolnienie ogromnego potencjału rynkowego
W miarę jak AI w robotyce przechodzi z fazy badań do rzeczywistych wdrożeń, wiele długotrwałych wąskich gardeł hamuje innowacje i ogranicza skalowalność, odporność oraz opłacalność ekosystemu robotów. Obejmują one scentralizowane wyspy danych i modeli, brak zaufania i możliwości śledzenia, ograniczenia prywatności i zgodności oraz niedostateczną interoperacyjność.
2.1 Problemy stojące przed AI w robotyce
-
Scentralizowane wyspy danych i modeli
Modele robotów wymagają ogromnych i zróżnicowanych zbiorów danych. Jednak obecnie rozwój danych i modeli jest wysoce scentralizowany, rozproszony i kosztowny, co prowadzi do fragmentacji systemów i słabej adaptacyjności. Roboty wdrażane w dynamicznych środowiskach rzeczywistych często wypadają słabo z powodu niewystarczającej różnorodności danych i ograniczonej odporności modeli.
-
Zaufanie, możliwość śledzenia i niezawodność
Brak przejrzystych i audytowalnych zapisów (obejmujących źródła danych, proces treningu modeli i historię operacji robotów) osłabia zaufanie i poczucie odpowiedzialności. To główna bariera dla użytkowników, regulatorów i przedsiębiorstw w adopcji robotów.
-
Prywatność, bezpieczeństwo i zgodność
W wrażliwych zastosowaniach, takich jak roboty medyczne i domowe, ochrona prywatności jest kluczowa i musi być zgodna z rygorystycznymi przepisami regionalnymi (np. europejskie GDPR). Scentralizowana infrastruktura ma trudności z zapewnieniem bezpiecznej i chroniącej prywatność współpracy AI, ograniczając udostępnianie danych i hamując innowacje w regulowanych lub wrażliwych sektorach.
-
Skalowalność i interoperacyjność
Systemy robotyczne napotykają poważne wyzwania w zakresie współdzielenia zasobów, wspólnego uczenia się oraz integracji na wielu platformach i formach. Ograniczenia te prowadzą do fragmentacji efektów sieciowych i utrudniają szybki transfer umiejętności między różnymi typami robotów.
2.2 AI w robotyce x Web3: strukturalne rozwiązania napędzają inwestowalne możliwości
Technologie Web3, poprzez zdecentralizowane, weryfikowalne, chroniące prywatność i współpracujące sieci robotów, fundamentalnie rozwiązują powyższe problemy. Ta fuzja otwiera nowe możliwości inwestycyjne:
-
Zdecentralizowany, współpracujący rozwój: Dzięki sieciom motywowanym zachętami roboty mogą współdzielić dane, wspólnie rozwijać modele i inteligentnych agentów.
-
Weryfikowalna możliwość śledzenia i odpowiedzialność: Technologia blockchain zapewnia niezmienne rejestry źródeł danych i modeli, tożsamości robotów oraz historii operacji, co jest kluczowe dla zaufania i zgodności.
-
Współpraca chroniąca prywatność: Zaawansowane rozwiązania kryptograficzne umożliwiają robotom wspólne trenowanie modeli i dzielenie się wnioskami bez ujawniania własnościowych lub wrażliwych danych.
-
Zarządzanie napędzane społecznością: Zdecentralizowane autonomiczne organizacje (DAO) kierują i nadzorują operacje robotów poprzez przejrzyste i inkluzywne zasady on-chain.
-
Interoperacyjność między formami: Otwarte ramy oparte na blockchainie sprzyjają płynnej współpracy między różnymi platformami robotycznymi, obniżając koszty rozwoju i przyspieszając transfer umiejętności.
-
Autonomiczna gospodarka agentów: Infrastruktura Web3 nadaje robotom niezależną tożsamość gospodarczą, umożliwiając im transakcje peer-to-peer, negocjacje i udział w tokenizowanych rynkach bez interwencji człowieka.
-
Zdecentralizowane sieci fizycznej infrastruktury (DePIN): Udostępnianie zasobów obliczeniowych, sensorycznych, przechowywania i połączeń peer-to-peer opartych na blockchainie zwiększa skalowalność i odporność sieci robotów.
Poniżej przedstawiono kilka innowacyjnych projektów napędzających rozwój tej dziedziny, ilustrujących potencjał i trendy fuzji AI w robotyce i Web3. Oczywiście, to tylko przykłady i nie stanowią porady inwestycyjnej.
Zdecentralizowany rozwój danych i modeli
Platformy napędzane Web3 demokratyzują rozwój danych i modeli poprzez motywowanie uczestników do udziału (np. stroje do przechwytywania ruchu, współdzielenie czujników, przesyłanie obrazów, oznaczanie danych, a nawet generowanie danych syntetycznych). Takie podejście pozwala budować bogatsze, bardziej zróżnicowane i reprezentatywne zbiory danych i modele, znacznie przekraczając możliwości pojedynczych firm. Zdecentralizowane ramy zwiększają także pokrycie przypadków brzegowych, co jest kluczowe dla robotów działających w nieprzewidywalnych środowiskach.
Przykłady:
-
Frodobots: Protokół crowdsourcingu rzeczywistych zbiorów danych poprzez gry z robotami. Wprowadzili projekt „Earth Rovers” – robota chodnikowego i globalną grę „Drive to Earn”, tworząc zbiór danych FrodoBots 2K Dataset, obejmujący nagrania z kamer, dane GPS, nagrania audio i dane zdalnego sterowania, zebrane w ponad 10 miastach i obejmujące około 2000 godzin jazdy robotem.
-
BitRobot: Platforma motywowana kryptowalutami, rozwijana wspólnie przez FrodoBots Lab i Protocol Labs, oparta na blockchainie Solana i architekturze subnetów. Każdy subnet to publiczne wyzwanie, a uczestnicy otrzymują nagrody tokenowe za przesyłanie modeli lub danych, motywując globalną współpracę i innowacje open source.
-
Reborn Network: Warstwa bazowa otwartego ekosystemu robotów AGI, oferująca strój do przechwytywania ruchu Rebocap, umożliwiający każdemu rejestrowanie i zarabianie na własnych rzeczywistych danych ruchowych, wspierając otwartość złożonych zbiorów danych dla robotów humanoidalnych.
-
PrismaX: Wykorzystuje globalną społeczność uczestników i zdecentralizowaną infrastrukturę do zapewnienia różnorodności i autentyczności danych, wdrażając silne mechanizmy weryfikacji i motywacji, napędzając skalowanie zbiorów danych dla robotyki.
Dowód pochodzenia i niezawodności
Technologia blockchain zapewnia ekosystemowi robotów przejrzystość end-to-end i przypisanie odpowiedzialności. Gwarantuje weryfikowalne pochodzenie danych i modeli, uwierzytelnia tożsamość i lokalizację robotów oraz utrzymuje przejrzyste rejestry historii operacji i udziału uczestników. Dodatkowo, współdzielona weryfikacja, systemy reputacji on-chain i mechanizmy walidacji oparte na stawkach zapewniają jakość danych i modeli, zapobiegając niskiej jakości lub oszukańczym wkładom.
Przykład:
-
OpenLedger: Infrastruktura AI blockchain wykorzystująca zbiory danych posiadane przez społeczność do trenowania i wdrażania dedykowanych modeli. Mechanizm „Proof of Attribution” zapewnia uczciwe nagradzanie wysokiej jakości uczestników danych.
Tokenizacja własności, licencjonowania i monetyzacji
Natywne narzędzia własności intelektualnej Web3 wspierają tokenizowane licencjonowanie dedykowanych zbiorów danych, zdolności robotów, modeli i inteligentnych agentów. Uczestnicy mogą używać smart kontraktów do bezpośredniego osadzania warunków licencyjnych w swoich zasobach, zapewniając automatyczne wypłaty tantiem przy ponownym użyciu lub monetyzacji danych lub modeli. Takie podejście promuje przejrzysty, niewymagający zezwoleń dostęp i tworzy otwarty, sprawiedliwy rynek dla danych i modeli robotycznych.
Przykład:
-
Poseidon: Pełnostackowa zdecentralizowana warstwa danych oparta na protokole Story zorientowanym na IP, oferująca prawnie autoryzowane dane treningowe AI.
Rozwiązania chroniące prywatność
Dane generowane w szpitalach, pokojach hotelowych czy domach, choć trudne do pozyskania publicznie, zawierają bogaty kontekst, który może znacząco poprawić wydajność modeli bazowych. Rozwiązania kryptograficzne przekształcają prywatne dane w aktywa on-chain, czyniąc je śledzonymi, złożonymi i zbywalnymi przy jednoczesnej ochronie prywatności. Technologie takie jak Trusted Execution Environments (TEEs) i Zero-Knowledge Proofs (ZKPs) umożliwiają bezpieczne obliczenia i weryfikację wyników bez ujawniania surowych danych. Narzędzia te pozwalają organizacjom trenować modele AI na rozproszonych, wrażliwych danych, zachowując prywatność i zgodność.
Przykład:
-
Phala Network: Umożliwia deweloperom wdrażanie aplikacji w bezpiecznym TEE do poufnego przetwarzania AI i danych.
Otwarte i audytowalne zarządzanie
Trening robotów zwykle opiera się na zamkniętych, nieprzejrzystych systemach typu „czarna skrzynka”. Przejrzyste i weryfikowalne zarządzanie jest kluczowe dla ograniczenia ryzyka i zwiększenia zaufania użytkowników, regulatorów i przedsiębiorstw. Technologie Web3 umożliwiają współtworzenie otwartego oprogramowania AI dla robotów poprzez nadzór społeczności on-chain.
Przykład:
-
Openmind: Otwarty, natywny stos AI wspierający roboty w myśleniu, uczeniu się i współpracy. Proponują standard ERC7777, mający na celu ustanowienie weryfikowalnego, uregulowanego ekosystemu robotów, skupiającego się na bezpieczeństwie, przejrzystości i skalowalności. Standard ten definiuje ustandaryzowane interfejsy do zarządzania tożsamością ludzi i robotów, egzekwowania reguł społecznych oraz rejestracji i usuwania uczestników, jasno określając ich prawa i obowiązki.
Ostatnie przemyślenia
Wraz z fuzją AI w robotyce i technologii Web3 wkraczamy w nową erę, w której autonomiczne systemy mogą realizować masową współpracę i adaptację. Następne 3 do 5 lat będą kluczowe – szybki rozwój sprzętu napędzi powstanie potężniejszych modeli AI, opartych na bogatszych zbiorach danych ze świata rzeczywistego i zdecentralizowanych mechanizmach współpracy. Spodziewamy się, że dedykowani agenci AI pojawią się w branży hotelarskiej, logistyce i innych sektorach, tworząc ogromne nowe możliwości rynkowe.
Jednak ta fuzja AI w robotyce i technologii kryptowalut niesie ze sobą wyzwania. Projektowanie zrównoważonych i skutecznych mechanizmów motywacyjnych pozostaje złożone i stale się rozwija – systemy muszą sprawiedliwie nagradzać uczestników, jednocześnie zapobiegając nadużyciom. Złożoność techniczna to kolejne wyzwanie – konieczne jest opracowanie solidnych i skalowalnych rozwiązań umożliwiających płynną integrację różnych typów robotów. Ponadto technologie ochrony prywatności muszą być wystarczająco niezawodne, aby zdobyć zaufanie interesariuszy, zwłaszcza przy przetwarzaniu wrażliwych danych. Szybko zmieniające się otoczenie regulacyjne wymaga również ostrożności, aby zapewnić zgodność w różnych jurysdykcjach. Rozwiązanie tych ryzyk i osiągnięcie zrównoważonych zwrotów jest kluczem do napędzania postępu technologicznego i szerokiej adopcji.
Śledźmy razem rozwój tej dziedziny, wspólnie napędzając postęp i wykorzystując pojawiające się możliwości na tym szybko rosnącym rynku.
Innowacje w robotyce to podróż, którą najlepiej odbywać wspólnie :)
Na koniec chciałbym podziękować Chain of Thought za „Robotics & The Age of Physical AI”, które były cennym wsparciem dla moich badań.