

Autor: merakiki
Übersetzung: TechFlow
Seit Jahrzehnten war der Anwendungsbereich der Robotik sehr begrenzt und konzentrierte sich hauptsächlich auf die Ausführung repetitiver Aufgaben in strukturierten Fabrikumgebungen. Heute jedoch revolutioniert Künstliche Intelligenz (KI) das Feld der Robotik, indem sie es Robotern ermöglicht, Benutzeranweisungen zu verstehen und auszuführen sowie sich an dynamisch verändernde Umgebungen anzupassen.
Wir treten in eine Ära schnellen Wachstums ein. Laut Citi Bank werden bis 2035 weltweit 1,3 Milliarden Roboter eingesetzt, deren Anwendungsbereich sich von Fabriken auf Haushalte und Dienstleistungsbranchen ausdehnen wird. Gleichzeitig schätzt Morgan Stanley, dass allein der Markt für humanoide Roboter bis 2050 ein Volumen von 5 Billionen US-Dollar erreichen könnte.
Obwohl diese Expansion ein enormes Marktpotenzial freisetzt, bringt sie auch erhebliche Herausforderungen in Bezug auf Zentralisierung, Vertrauen, Datenschutz und Skalierbarkeit mit sich. Web3-Technologien bieten transformative Lösungen für diese Probleme, indem sie dezentrale, überprüfbare, datenschutzfreundliche und kollaborative Roboternetzwerke unterstützen.
In diesem Artikel werden wir die sich ständig weiterentwickelnde Wertschöpfungskette von KI-Robotern eingehend untersuchen, uns insbesondere auf den Bereich der humanoiden Roboter konzentrieren und die faszinierenden Möglichkeiten aufzeigen, die sich aus der Verschmelzung von KI-Robotern und Web3-Technologien ergeben.
Wertschöpfungskette von KI-Robotern
Die Wertschöpfungskette von KI-Robotern besteht aus vier grundlegenden Ebenen: Hardware, Intelligenz, Daten und Agenten. Jede Ebene baut auf den anderen auf und ermöglicht es Robotern, in komplexen realen Umgebungen zu erkennen, zu schlussfolgern und zu handeln.
In den letzten Jahren wurden auf der Hardware-Ebene unter der Führung von Branchenpionieren wie Unitree und Figure AI erhebliche Fortschritte erzielt. Dennoch bestehen auf den nicht-hardwarebezogenen Ebenen weiterhin viele zentrale Herausforderungen, insbesondere der Mangel an hochwertigen Datensätzen, das Fehlen allgemeiner Basismodelle, schlechte Kompatibilität zwischen Geräten sowie der Bedarf an zuverlässigem Edge-Computing. Daher liegen die größten Entwicklungschancen derzeit in der Intelligenz-, Daten- und Agentenebene.
1.1 Hardware-Ebene: „Körper“
Heutzutage ist die Herstellung und der Einsatz moderner „Roboterkörper“ einfacher denn je. Derzeit gibt es auf dem Markt über 100 verschiedene Arten von humanoiden Robotern, darunter Teslas Optimus, Unitrees G1, Agility Robotics' Digit und Figure AI's Figure 02.
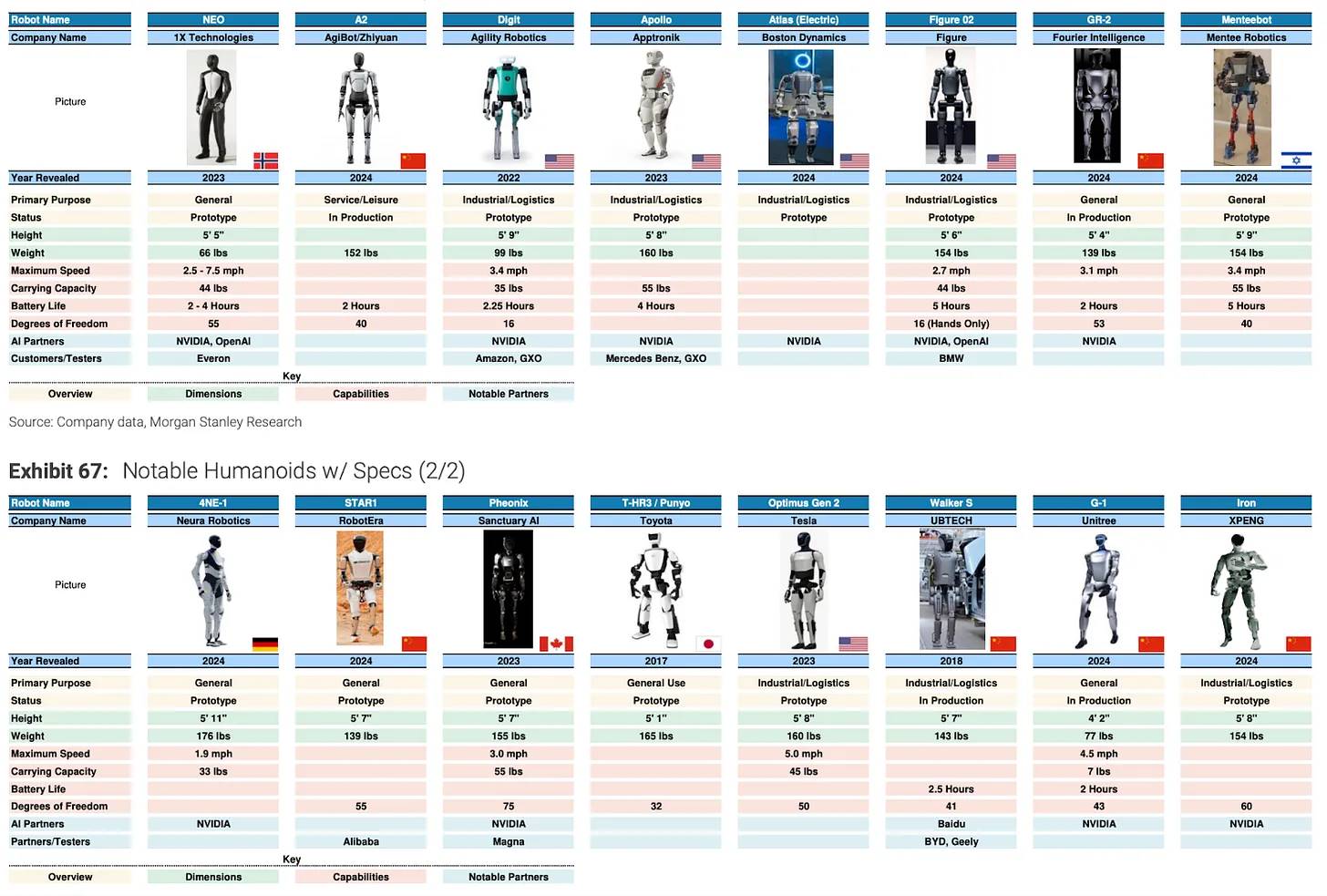
Quelle: Morgan Stanley, „Humanoid Robots 100: Humanoid Robot Value Chain Map“
Dieser Fortschritt ist auf technologische Durchbrüche bei den folgenden drei Schlüsselkomponenten zurückzuführen:
-
Aktuatoren: Als „Muskeln“ des Roboters wandeln Aktuatoren digitale Befehle in präzise Bewegungen um. Innovationen bei Hochleistungsmotoren ermöglichen es Robotern, schnelle und präzise Bewegungen auszuführen, während dielektrische Elastomer-Aktuatoren (DEAs) für feinfühlige Aufgaben geeignet sind. Diese Technologien haben die Flexibilität von Robotern erheblich verbessert, wie Teslas Optimus Gen 2 mit 22 Freiheitsgraden (DoF) und Unitrees G1 zeigen, die beide eine menschenähnliche Beweglichkeit und beeindruckende Mobilität demonstrieren.
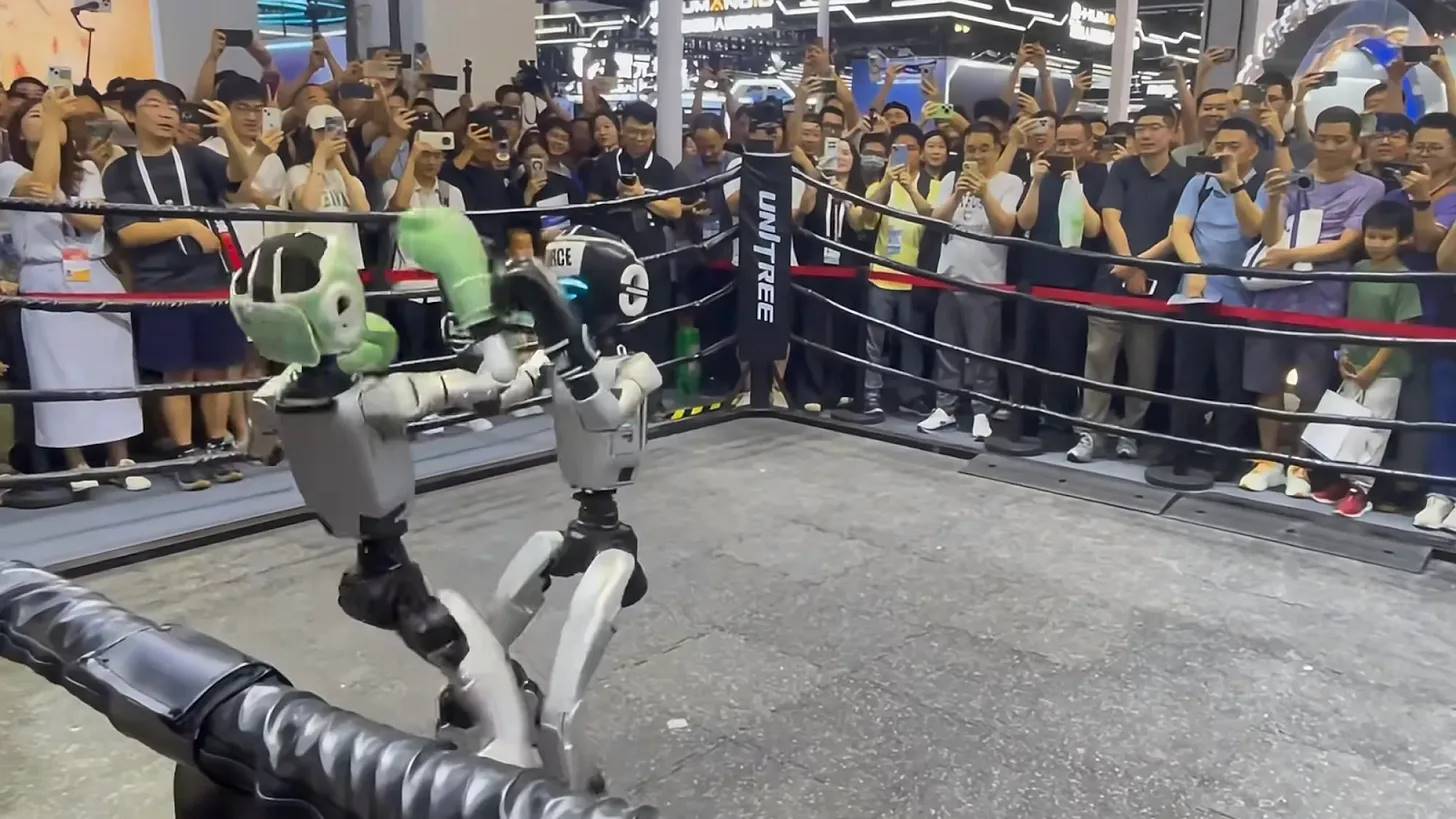
Quelle: Unitree präsentiert seinen neuesten humanoiden Roboter beim Boxkampf auf der WAIC World Artificial Intelligence Conference 2025
-
Sensoren: Fortschrittliche Sensoren ermöglichen es Robotern, ihre Umgebung durch visuelle, LIDAR/RADAR-, taktile und Audioeingaben wahrzunehmen und zu interpretieren. Diese Technologien unterstützen Roboter bei sicherer Navigation, präziser Manipulation und situationsbezogener Wahrnehmung.
-
Embedded Computing: CPUs, GPUs und KI-Beschleuniger (wie TPUs und NPUs) auf dem Gerät ermöglichen die Echtzeitverarbeitung von Sensordaten und das Ausführen von KI-Modellen für autonome Entscheidungen. Zuverlässige, latenzarme Verbindungen sorgen für nahtlose Koordination, während hybride Edge-Cloud-Architekturen es Robotern ermöglichen, rechenintensive Aufgaben bei Bedarf auszulagern.
1.2 Intelligenz-Ebene: „Gehirn“
Mit der zunehmenden Reife der Hardware verlagert sich der Fokus der Branche auf den Aufbau des „Robotergehirns“: leistungsstarke Basismodelle und fortschrittliche Steuerungsstrategien.
Vor der Integration von KI waren Roboter auf regelbasierte Automatisierung angewiesen, führten vorprogrammierte Aktionen aus und verfügten über keine adaptive Intelligenz.
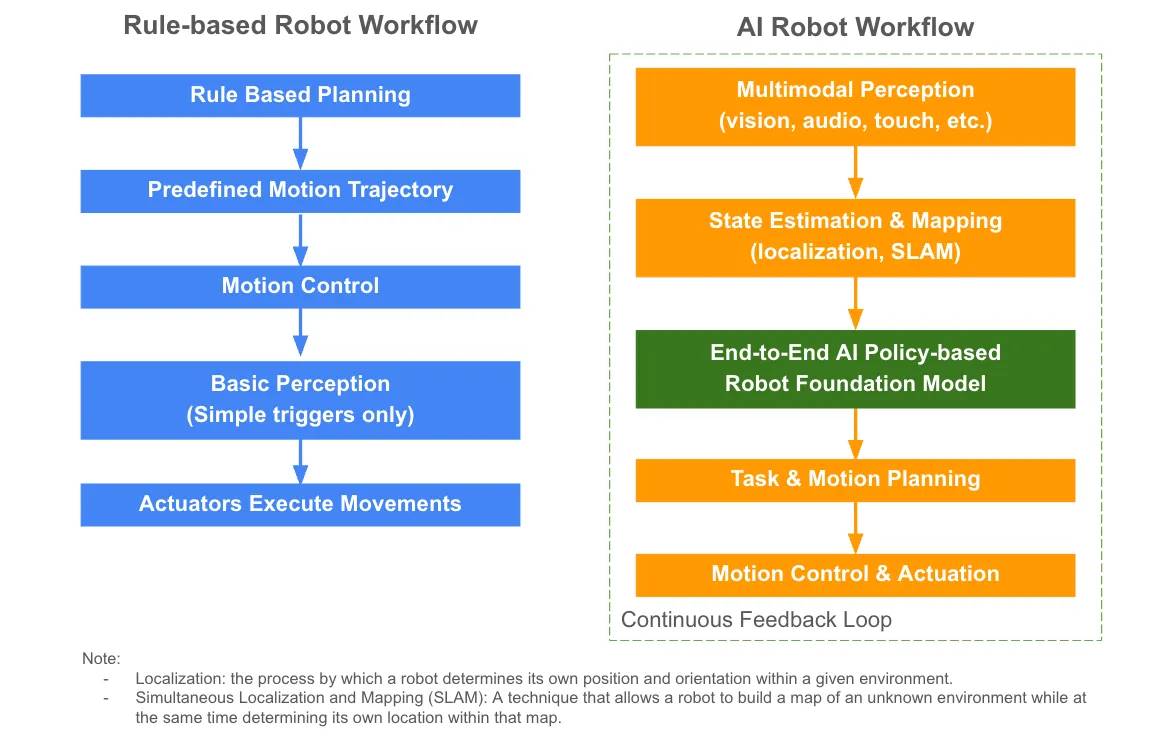
Basismodelle werden schrittweise im Bereich der Robotik eingesetzt. Allein auf große Sprachmodelle (LLMs) zu setzen, reicht jedoch bei weitem nicht aus, da Roboter in dynamischen physischen Umgebungen wahrnehmen, schlussfolgern und handeln müssen. Um diesen Anforderungen gerecht zu werden, entwickelt die Branche End-to-End-Roboterbasismodelle auf Basis von Strategien. Diese Modelle ermöglichen es Robotern:
-
Wahrnehmen (Perceive): Empfang von multimodalen Sensordaten (Visuell, Audio, Taktik)
-
Planen (Plan): Schätzung des eigenen Zustands, Kartierung der Umgebung und Interpretation komplexer Anweisungen, direkte Abbildung von Wahrnehmung auf Handlung, Reduzierung manueller Eingriffe
-
Handeln (Act): Erstellung von Bewegungsplänen und Ausgabe von Steuerbefehlen zur Echtzeit-Ausführung
Diese Modelle lernen allgemeine „Strategien“ für die Interaktion mit der Welt, sodass Roboter sich an verschiedene Aufgaben anpassen und mit höherer Intelligenz und Autonomie arbeiten können. Fortgeschrittene Modelle nutzen zudem kontinuierliches Feedback, sodass Roboter aus Erfahrungen lernen und ihre Anpassungsfähigkeit in dynamischen Umgebungen weiter steigern.
VLA-Modelle ordnen sensorische Eingaben (hauptsächlich visuelle Daten und natürliche Sprachbefehle) direkt den Roboteraktionen zu, sodass Roboter auf das, was sie „sehen“ und „hören“, mit passenden Steuerbefehlen reagieren können. Bemerkenswerte Beispiele sind Googles RT-2, Nvidias Isaac GR00T N1 und Physical Intelligences π0.
Um diese Modelle zu verbessern, werden in der Regel mehrere komplementäre Methoden integriert, wie zum Beispiel:
-
Weltmodelle (World Models): Aufbau interner Simulationen der physischen Umgebung, um komplexe Verhaltensweisen zu erlernen, Ergebnisse vorherzusagen und Handlungen zu planen. Zum Beispiel ist Googles kürzlich vorgestelltes Genie 3 ein universelles Weltmodell, das beispiellos vielfältige interaktive Umgebungen generieren kann.
-
Tiefenverstärkungslernen (Deep Reinforcement Learning): Hilft Robotern durch Versuch und Irrtum, Verhaltensweisen zu erlernen.
-
Teleoperation: Ermöglicht Fernsteuerung und liefert Trainingsdaten.
-
Learning from Demonstration (LfD)/Imitationslernen: Vermittelt Robotern neue Fähigkeiten durch Nachahmung menschlicher Handlungen.
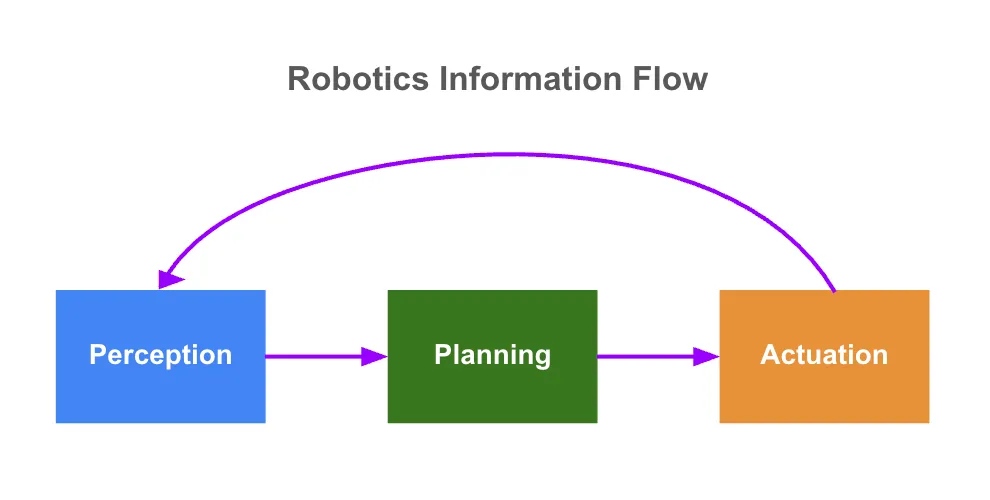
Die folgende Abbildung zeigt, wie diese Methoden in Roboterbasismodellen eingesetzt werden.
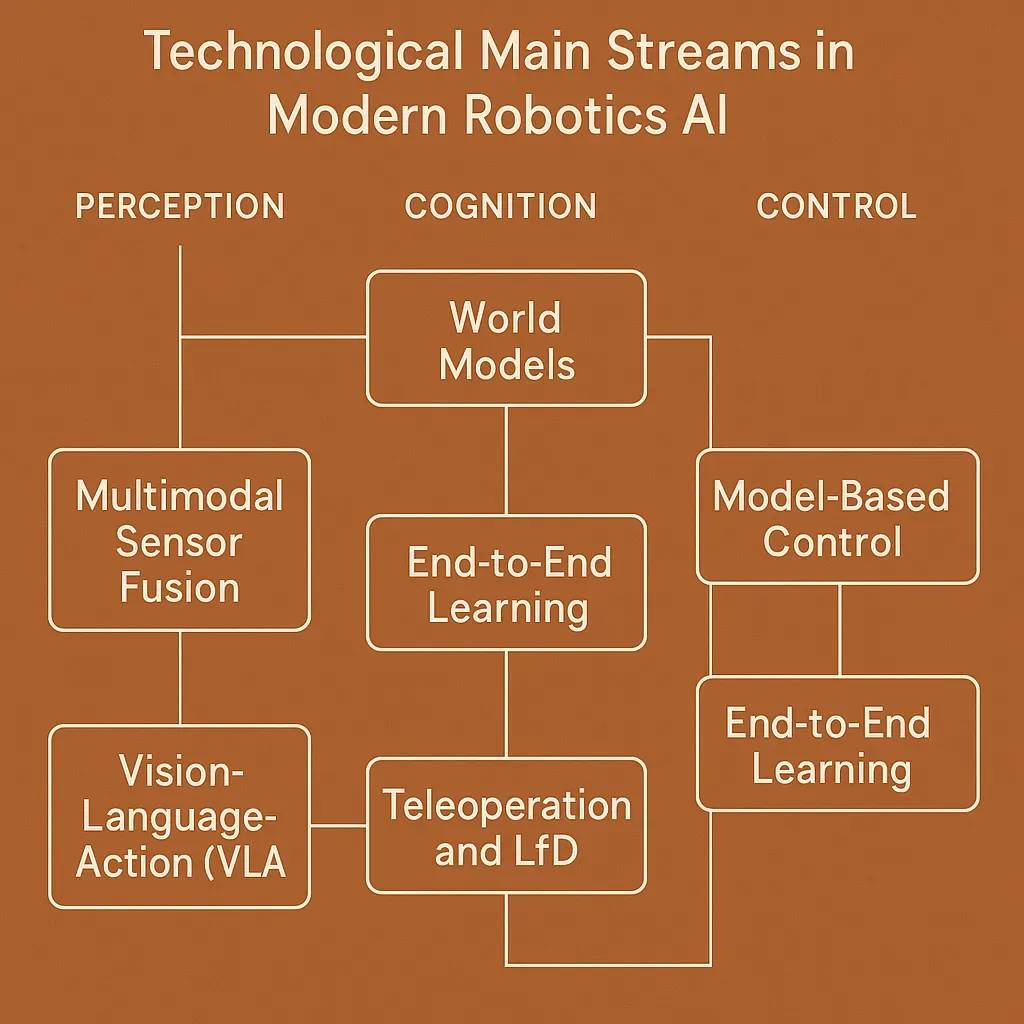
Quelle: World Models: the physical intelligence core driving us toward AGI
Jüngste Open-Source-Durchbrüche wie Physical Intelligences π0 und Nvidias Isaac GR00T N1 markieren wichtige Fortschritte in diesem Bereich. Die meisten Roboterbasismodelle sind jedoch weiterhin zentralisiert und proprietär. Unternehmen wie Covariant und Tesla behalten proprietären Code und Datensätze, hauptsächlich aufgrund fehlender offener Anreizmechanismen.
Das Fehlen von Transparenz schränkt die Zusammenarbeit und Interoperabilität zwischen Roboterplattformen ein und unterstreicht den Bedarf an sicheren, transparenten Modell-Sharing-, On-Chain-Community-Governance-Standards und Interoperabilitätsschichten über Geräte hinweg. Dieser Ansatz wird Vertrauen und Zusammenarbeit fördern und die Entwicklung des Sektors vorantreiben.
1.3 Datenebene: Das „Wissen“ des Gehirns
Leistungsstarke Roboterdatensätze beruhen auf drei Säulen: Menge, Qualität und Vielfalt.
Obwohl die Branche bereits Fortschritte bei der Datensammlung gemacht hat, ist der Umfang bestehender Roboterdatensätze weiterhin unzureichend. Beispielsweise wurde OpenAIs GPT-3 mit 300 Milliarden Token trainiert, während der größte Open-Source-Roboterdatensatz Open X-Embodiment nur über 1 Million reale Robotertrajektorien mit 22 Robotertypen verfügt. Dies ist weit entfernt von dem Datenvolumen, das für starke Generalisierungsfähigkeiten erforderlich ist.
Einige proprietäre Methoden, wie Teslas Datensammlung durch Data Factories, bei denen Mitarbeiter Motion-Capture-Anzüge tragen, um Trainingsdaten zu generieren, helfen zwar, mehr reale Bewegungsdaten zu sammeln. Diese Methoden sind jedoch teuer, weisen eine begrenzte Datenvielfalt auf und sind schwer skalierbar.
Um diese Herausforderungen zu bewältigen, nutzt die Robotikbranche derzeit drei Hauptdatenquellen:
-
Internetdaten: Internetdaten sind umfangreich und leicht skalierbar, bestehen jedoch hauptsächlich aus Beobachtungsdaten und enthalten keine Sensor- oder Bewegungssignale. Durch das Vortrainieren großer visuell-sprachlicher Modelle (wie GPT-4V und Gemini) auf Internetdaten können wertvolle semantische und visuelle Vorinformationen bereitgestellt werden. Darüber hinaus können Videos durch das Hinzufügen kinematischer Labels in verwertbare Trainingsdaten umgewandelt werden.
-
Synthetische Daten: Durch Simulation erzeugte synthetische Daten ermöglichen schnelle, groß angelegte Experimente und decken vielfältige Szenarien ab, spiegeln jedoch nicht vollständig die Komplexität der realen Welt wider – diese Einschränkung wird als „Sim-to-Real-Gap“ bezeichnet. Forscher begegnen diesem Problem durch Domänenanpassung (z. B. Datenaugmentation, Domänenrandomisierung, adversariales Lernen) und Sim-to-Real-Transfer, indem sie Modelle iterativ optimieren und in realen Umgebungen testen und feinabstimmen.
-
Echtdaten: Obwohl selten und teuer, sind Echtdaten entscheidend für die Implementierung von Modellen und die Überbrückung der Lücke zwischen Simulation und realem Einsatz. Hochwertige Echtdaten umfassen in der Regel Egoperspektiven, die aufzeichnen, was der Roboter während der Aufgabe „sieht“, sowie Bewegungsdaten, die seine präzisen Aktionen dokumentieren. Bewegungsdaten werden meist durch menschliche Demonstrationen oder Teleoperation gesammelt, wobei Virtual-Reality-, Motion-Capture-Geräte oder taktile Lehre eingesetzt werden, um sicherzustellen, dass das Modell aus genauen realen Beispielen lernt.
Studien zeigen, dass das Kombinieren von Internetdaten, Echtdaten und synthetischen Daten für das Robotertraining die Trainingseffizienz und Robustheit der Modelle deutlich verbessert, verglichen mit der ausschließlichen Nutzung einer einzelnen Datenquelle (Anmerkung: Robustheit bezeichnet die Fähigkeit eines Systems, auch unter abnormalen oder gefährlichen Bedingungen stabil und widerstandsfähig zu bleiben).
Gleichzeitig ist zwar eine größere Datenmenge hilfreich, aber die Vielfalt der Daten ist noch wichtiger, insbesondere um Generalisierung auf neue Aufgaben und Roboterformen zu erreichen. Um diese Vielfalt zu erreichen, sind offene Datenplattformen und kollaboratives Datenteilen erforderlich, einschließlich der Erstellung von Cross-Instance-Datensätzen, die verschiedene Roboterformen unterstützen und so die Entwicklung leistungsfähigerer Basismodelle fördern.
1.4 Agentenebene: „Physische KI-Agenten“
Der Trend zur Entwicklung physischer KI-Agenten beschleunigt sich, wobei autonome Roboter in der realen Welt unabhängig agieren können. Der Fortschritt auf der Agentenebene hängt von der Feinabstimmung der Modelle, kontinuierlichem Lernen und der praktischen Anpassung an die einzigartige Form jedes Roboters ab.
Hier sind einige aufkommende Chancen zur Beschleunigung der Entwicklung physischer KI-Agenten:
-
Kontinuierliches Lernen und adaptive Infrastruktur: Durch Echtzeit-Feedbackschleifen und geteilte Erfahrungen während des Einsatzes können Roboter sich kontinuierlich verbessern.
-
Autonome Agentenökonomie: Roboter agieren als eigenständige Wirtschaftseinheiten – sie handeln Ressourcen wie Rechenleistung und Sensordaten auf Roboter-Marktplätzen und generieren Einnahmen durch tokenisierte Dienstleistungen.
-
Multi-Agenten-Systeme: Die nächste Generation von Plattformen und Algorithmen ermöglicht es Robotergruppen, sich zu koordinieren, zusammenzuarbeiten und kollektives Verhalten zu optimieren.
Verschmelzung von KI-Robotern und Web3: Entfesselung eines riesigen Marktpotenzials
Während KI-Roboter von der Forschungsphase zur realen Implementierung übergehen, behindern mehrere langjährige Engpässe Innovationen und begrenzen die Skalierbarkeit, Robustheit und wirtschaftliche Tragfähigkeit des Robotik-Ökosystems. Zu diesen Engpässen gehören zentralisierte Daten- und Modell-Silos, fehlendes Vertrauen und Nachvollziehbarkeit, Datenschutz- und Compliance-Beschränkungen sowie mangelnde Interoperabilität.
2.1 Schmerzpunkte von KI-Robotern
-
Zentralisierte Daten- und Modellsilos
Roboter-Modelle benötigen große und vielfältige Datensätze. Heutzutage sind Daten- und Modellentwicklung jedoch stark zentralisiert, fragmentiert und teuer, was zu isolierten Systemen mit geringer Anpassungsfähigkeit führt. Roboter, die in dynamischen realen Umgebungen eingesetzt werden, schneiden oft schlecht ab, weil es an Datenvielfalt und Modellrobustheit mangelt.
-
Vertrauen, Nachvollziehbarkeit und Zuverlässigkeit
Das Fehlen transparenter und prüfbarer Aufzeichnungen (einschließlich Datenquellen, Modelltrainingsprozesse und Roboterbetriebsverlauf) untergräbt Vertrauen und Verantwortlichkeit. Dies ist ein Haupthindernis für die Akzeptanz von Robotern durch Nutzer, Regulierungsbehörden und Unternehmen.
-
Datenschutz, Sicherheit und Compliance
In sensiblen Anwendungen wie Medizin- und Haushaltsrobotern ist Datenschutz entscheidend, und es müssen strenge regionale Vorschriften (wie die europäische Datenschutz-Grundverordnung, GDPR) eingehalten werden. Zentralisierte Infrastrukturen haben Schwierigkeiten, sichere und datenschutzfreundliche KI-Kollaboration zu unterstützen, was den Datenaustausch einschränkt und Innovationen in regulierten oder sensiblen Bereichen hemmt.
-
Skalierbarkeit und Interoperabilität
Robotersysteme stehen vor großen Herausforderungen bei der Ressourcenteilung, beim kollaborativen Lernen und bei der Integration über verschiedene Plattformen und Formen hinweg. Diese Einschränkungen führen zu fragmentierten Netzwerkeffekten und behindern die schnelle Übertragung von Fähigkeiten zwischen verschiedenen Robotertypen.
2.2 KI-Roboter x Web3: Strukturelle Lösungen treiben investierbare Chancen
Web3-Technologien lösen die oben genannten Schmerzpunkte grundlegend durch dezentrale, überprüfbare, datenschutzfreundliche und kollaborative Roboternetzwerke. Diese Verschmelzung eröffnet neue investierbare Marktchancen:
-
Dezentrale kollaborative Entwicklung: Durch anreizgesteuerte Netzwerke können Roboter Daten teilen und gemeinsam Modelle und intelligente Agenten entwickeln.
-
Überprüfbare Nachvollziehbarkeit und Verantwortlichkeit: Blockchain-Technologie gewährleistet unveränderliche Aufzeichnungen über Daten- und Modellquellen, Roboteridentitäten und Betriebsverläufe – entscheidend für Vertrauen und Compliance.
-
Datenschutzfreundliche Kollaboration: Fortschrittliche kryptografische Lösungen ermöglichen es Robotern, Modelle gemeinsam zu trainieren und Erkenntnisse zu teilen, ohne proprietäre oder sensible Daten offenzulegen.
-
Community-gesteuerte Governance: Dezentrale autonome Organisationen (DAOs) leiten und überwachen Roboteroperationen durch transparente und inklusive On-Chain-Regeln und -Politiken.
-
Interoperabilität über verschiedene Formen hinweg: Blockchain-basierte offene Frameworks fördern nahtlose Zusammenarbeit zwischen verschiedenen Roboterplattformen, senken Entwicklungskosten und beschleunigen den Fähigkeits-Transfer.
-
Autonome Agentenökonomie: Web3-Infrastrukturen verleihen Robotern eine unabhängige wirtschaftliche Agentenidentität, sodass sie Peer-to-Peer-Transaktionen durchführen, verhandeln und an tokenisierten Märkten teilnehmen können – ohne menschliches Eingreifen.
-
Dezentrale physische Infrastrukturnetze (DePIN): Blockchain-basierte Peer-to-Peer-Teilung von Rechen-, Sensor-, Speicher- und Verbindungsressourcen erhöht die Skalierbarkeit und Resilienz von Roboternetzwerken.
Im Folgenden sind einige innovative Projekte aufgeführt, die diesen Bereich vorantreiben. Diese Beispiele zeigen das Potenzial und die Trends der Verschmelzung von KI-Robotern und Web3. Natürlich dienen sie nur als Referenz und stellen keine Anlageberatung dar.
Dezentrale Daten- und Modellentwicklung
Web3-basierte Plattformen demokratisieren die Daten- und Modellentwicklung, indem sie Beiträge (wie Motion-Capture-Anzüge, Sensor-Sharing, visuelle Uploads, Datenannotation oder sogar synthetische Datengenerierung) durch Anreize fördern. Dieser Ansatz ermöglicht den Aufbau reichhaltigerer, vielfältigerer und repräsentativerer Datensätze und Modelle, als es einzelne Unternehmen könnten. Dezentrale Frameworks erhöhen zudem die Abdeckung von Randfällen, was für Roboter in unvorhersehbaren Umgebungen entscheidend ist.
Beispiele:
-
Frodobots: Ein Protokoll für Crowdsourcing von realen Datensätzen durch Roboter-Gaming. Ihr „Earth Rovers“-Projekt – ein Gehwegroboter und ein globales „Drive to Earn“-Spiel – hat erfolgreich den FrodoBots 2K Dataset erstellt, der Kamerabilder, GPS-Daten, Audioaufnahmen und menschliche Steuerungsdaten aus über 10 Städten und insgesamt etwa 2.000 Stunden ferngesteuerter Roboterfahrten umfasst.
-
BitRobot: Eine von FrodoBots Lab und Protocol Labs gemeinsam entwickelte, kryptografisch anreizbasierte Plattform auf Basis der Solana-Blockchain und Subnet-Architektur. Jedes Subnetz ist als öffentliche Herausforderung konzipiert, bei der Mitwirkende durch das Einreichen von Modellen oder Daten Token-Belohnungen erhalten und so globale Zusammenarbeit und Open-Source-Innovation fördern.
-
Reborn Network: Die Basisschicht des offenen AGI-Roboter-Ökosystems, die den Rebocap-Motion-Capture-Anzug bereitstellt, mit dem jeder reale Bewegungsdaten aufzeichnen und monetarisieren kann, um offene Datensätze für komplexe humanoide Roboter zu fördern.
-
PrismaX: Nutzt die globale Community von Mitwirkenden und stellt durch dezentrale Infrastruktur Datenvielfalt und -authentizität sicher, implementiert starke Verifizierungs- und Anreizmechanismen und fördert so die Skalierung von Roboterdatensätzen.
Nachweis von Herkunft und Zuverlässigkeit
Blockchain-Technologie bietet dem Robotik-Ökosystem End-to-End-Transparenz und Verantwortlichkeit. Sie gewährleistet überprüfbare Herkunft von Daten und Modellen, authentifiziert Roboteridentitäten und physische Standorte und pflegt klare Aufzeichnungen über Betriebsverläufe und Mitwirkende. Darüber hinaus sichern kollaborative Verifizierung, On-Chain-Reputationssysteme und stakingsbasierte Verifizierungsmechanismen die Qualität von Daten und Modellen und verhindern, dass minderwertige oder betrügerische Eingaben das Ökosystem schädigen.
Beispiele:
-
OpenLedger: Eine KI-Blockchain-Infrastruktur, die es der Community ermöglicht, Datensätze zu besitzen, Modelle zu trainieren und bereitzustellen. Das „Proof of Attribution“-Verfahren stellt sicher, dass hochwertige Datenbeiträger fair belohnt werden.
Tokenisierte Eigentumsrechte, Lizenzen und Monetarisierung
Web3-native Tools für geistiges Eigentum unterstützen die tokenisierte Lizenzierung von proprietären Datensätzen, Roboterfähigkeiten, Modellen und intelligenten Agenten. Mitwirkende können Lizenzbedingungen direkt in ihre Assets über Smart Contracts einbetten, um bei Wiederverwendung oder Monetarisierung von Daten oder Modellen automatisch Lizenzgebühren zu erhalten. Dieser Ansatz fördert den transparenten, erlaubnisfreien Zugang und schafft einen offenen und fairen Markt für Roboter-Daten und -Modelle.
Beispiele:
-
Poseidon: Eine Full-Stack-dezentrale Datenschicht auf Basis des Story-Protokolls mit IP-Zentrum, die rechtlich autorisierte KI-Trainingsdaten bereitstellt.
Datenschutzfreundliche Lösungen
In Szenarien wie Krankenhäusern, Hotelzimmern oder Haushalten erzeugte hochwertige Daten sind zwar schwer öffentlich zugänglich, enthalten aber reichhaltige Kontextinformationen, die die Leistung von Basismodellen erheblich steigern können. Durch kryptografische Lösungen werden private Daten in On-Chain-Assets umgewandelt, die nachverfolgbar, kombinierbar und monetarisierbar sind und gleichzeitig die Privatsphäre schützen. Trusted Execution Environments (TEEs) und Zero-Knowledge-Proofs (ZKPs) ermöglichen sichere Berechnungen und Ergebnisverifizierung, ohne die Rohdaten offenzulegen. Diese Tools ermöglichen es Organisationen, KI-Modelle auf verteilten sensiblen Daten zu trainieren und gleichzeitig Datenschutz und Compliance zu gewährleisten.
Beispiele:
-
Phala Network: Ermöglicht Entwicklern, Anwendungen in sicheren TEEs für vertrauliche KI- und Datenverarbeitung bereitzustellen.
Offene und prüfbare Governance
Das Training von Robotern basiert oft auf proprietären Blackbox-Systemen, denen es an Transparenz und Anpassungsfähigkeit mangelt. Transparente und überprüfbare Governance ist entscheidend, um Risiken zu minimieren und das Vertrauen von Nutzern, Regulierungsbehörden und Unternehmen zu stärken. Web3-Technologien ermöglichen durch On-Chain-Community-gesteuerte Aufsicht die kollaborative Entwicklung von Open-Source-Roboterintelligenz.
Beispiele:
-
Openmind: Ein offener, KI-nativer Software-Stack, der Robotern beim Denken, Lernen und Zusammenarbeiten hilft. Sie haben den ERC7777-Standard vorgeschlagen, um ein überprüfbares, regelbasiertes Roboter-Ökosystem zu schaffen, das sich auf Sicherheit, Transparenz und Skalierbarkeit konzentriert. Der Standard definiert standardisierte Schnittstellen zur Verwaltung von menschlichen und Roboteridentitäten, zur Durchsetzung sozialer Regelwerke sowie zur Registrierung und Entfernung von Teilnehmern und legt die damit verbundenen Rechte und Pflichten fest.
Abschließende Gedanken
Mit der Verschmelzung von KI-Robotern und Web3-Technologien treten wir in eine neue Ära ein, in der autonome Systeme groß angelegte Zusammenarbeit und Anpassung ermöglichen. Die nächsten 3 bis 5 Jahre werden entscheidend sein, da die rasante Entwicklung der Hardware leistungsfähigere KI-Modelle hervorbringen wird, die auf reichhaltigeren realen Datensätzen und dezentralen Kollaborationsmechanismen basieren. Wir erwarten, dass spezialisierte KI-Agenten in Branchen wie Hotellerie und Logistik eine wichtige Rolle spielen und enorme neue Marktchancen schaffen werden.
Die Verschmelzung von KI-Robotern und Kryptotechnologien bringt jedoch auch Herausforderungen mit sich. Das Design ausgewogener und effektiver Anreizmechanismen bleibt komplex und entwickelt sich ständig weiter; das System muss Beitragsleistende fair belohnen und gleichzeitig Missbrauch verhindern. Auch die technische Komplexität ist eine große Herausforderung – es müssen robuste und skalierbare Lösungen entwickelt werden, um die nahtlose Integration verschiedener Robotertypen zu ermöglichen. Darüber hinaus müssen Datenschutztechnologien zuverlässig genug sein, um das Vertrauen der Stakeholder zu gewinnen, insbesondere bei der Verarbeitung sensibler Daten. Das sich schnell verändernde regulatorische Umfeld erfordert ebenfalls eine vorsichtige Herangehensweise, um die Compliance in verschiedenen Rechtsordnungen sicherzustellen. Die Bewältigung dieser Risiken und die Erzielung nachhaltiger Renditen sind der Schlüssel, um den technologischen Fortschritt und die breite Anwendung voranzutreiben.
Lassen Sie uns gemeinsam die Entwicklung dieses Bereichs verfolgen, den Fortschritt durch Zusammenarbeit fördern und die Chancen nutzen, die in diesem schnell wachsenden Markt entstehen.
Die Innovation in der Robotik ist eine Reise, die man am besten gemeinsam antritt :)
Abschließend möchte ich Chain of Thought für „Robotics & The Age of Physical AI“ danken, das meine Forschung wertvoll unterstützt hat.

